Your 9dof imu kalman filter wallpapers are available. 9dof imu kalman filter are a topic that is being searched for and liked by netizens today. You can Get the 9dof imu kalman filter files here. Download all free vectors in Site Adı. 9dof imu kalman filter was narrated completly and detail.
If you’re searching for 9dof imu kalman filter images information linked to the 9dof imu kalman filter topic, you have come to the ideal site. Our website always provides you with hints for seeing the highest quality video and image content, please kindly hunt and locate more enlightening video content and images that fit your interests.
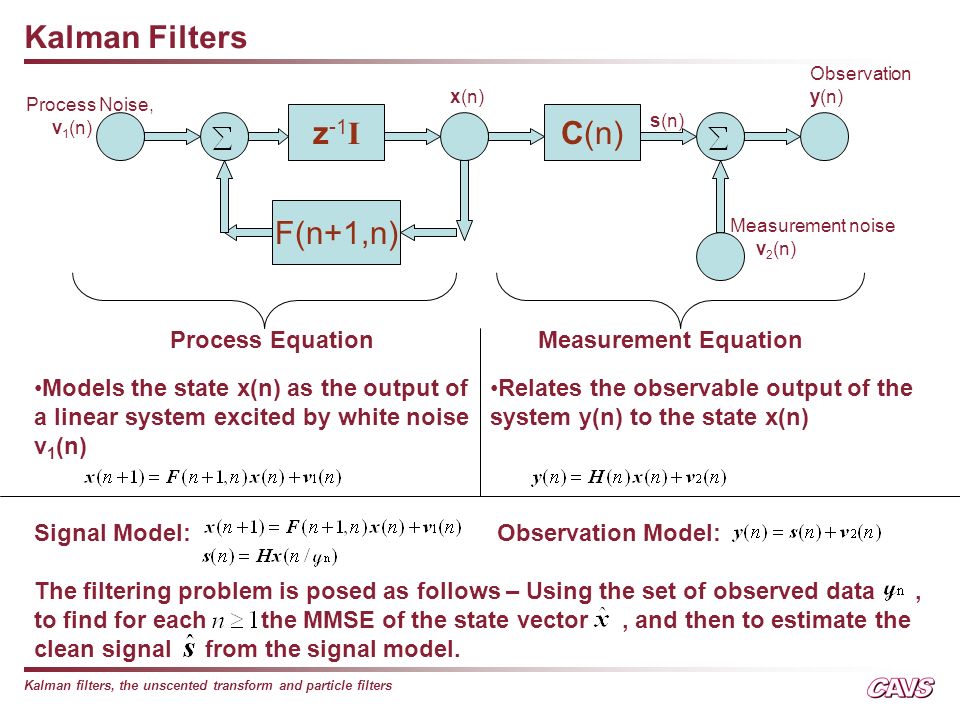
9dof Imu Kalman Filter. 8102016 For state of the art filtering with a 9DOF or 10DOF sensor on Arduino I recommend the open source RTIMUlib library. MPU-6050 - 3-axis gyroscope and 3-axis accelerometer. Introduction to Kalman Filter The Kalman filter is widely used in present robotics such as guidance navigation and control of vehicles particularly aircraft and spacecraft. The Kalman filter used in all the examples can be found at my other repository. A Simplified Block Diagram Of The Dcm Imu Filter The Covariance Download Scientific Diagram from www.researchgate.net
MPU-6050 and HMC5883L - 3-axis gyroscope 3-axis accelerometer and 3-axis magnetometer. Tutorials Jaycon Systems August 28 2012. That title is a mouthful. Fork of minimu-9v2 by brian claus. MPU-6050 - 3-axis gyroscope and 3-axis accelerometer. GetAngle roll gyroXrate dt.
Camshift algorithm is based on mean-shift algorithm which is a procedure.
The use of low cost IMUs is primar-. MPU-6050 - 3-axis gyroscope and 3-axis accelerometer. The aim of this project is to achieve efficient orientation estimation algorithms using a 9 DOF IMU. Click the link for the source code and more info. That title is a mouthful. 8102016 For state of the art filtering with a 9DOF or 10DOF sensor on Arduino I recommend the open source RTIMUlib library. The theory behind this algorithm was first introduced in my Imu Guide article. L3GD20 LSM303DLHC mbed-dsp mbed. Calculate the angle using a Kalman filter endif. If abs kalAngleY. The chip is a Sparkfun SEN-10724 9DOF IMU breakout board.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site value, please support us by sharing this posts to your preference social media accounts like Facebook, Instagram and so on or you can also bookmark this blog page with the title 9dof imu kalman filter by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.