Your Extended kalman filter example code images are available in this site. Extended kalman filter example code are a topic that is being searched for and liked by netizens today. You can Find and Download the Extended kalman filter example code files here. Download all free photos in Site Adı. Extended kalman filter example code was advised robust and image item.
If you’re searching for extended kalman filter example code pictures information related to the extended kalman filter example code interest, you have pay a visit to the right blog. Our site frequently gives you hints for seeing the highest quality video and picture content, please kindly hunt and find more informative video content and graphics that fit your interests.
Extended Kalman Filter Example Code. Programming a Robotic Car course. In this example our Kalman filter inherits from the Extended Kalman Filter because its a non-linear problem and are non-linear functions The first two template parameters are respectively the floating point type used by the filter floator double and the beginning index of vectors and matrices 0 or 1. First well create a prior state. Retrieved March 24 2021. Using Nonlinear Kalman Filtering To Estimate Signals Embedded Com from www.embedded.com
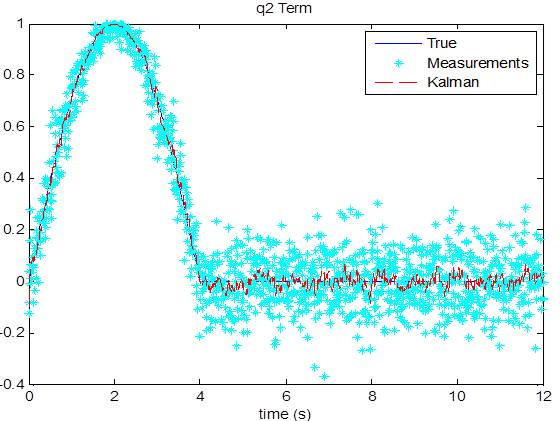
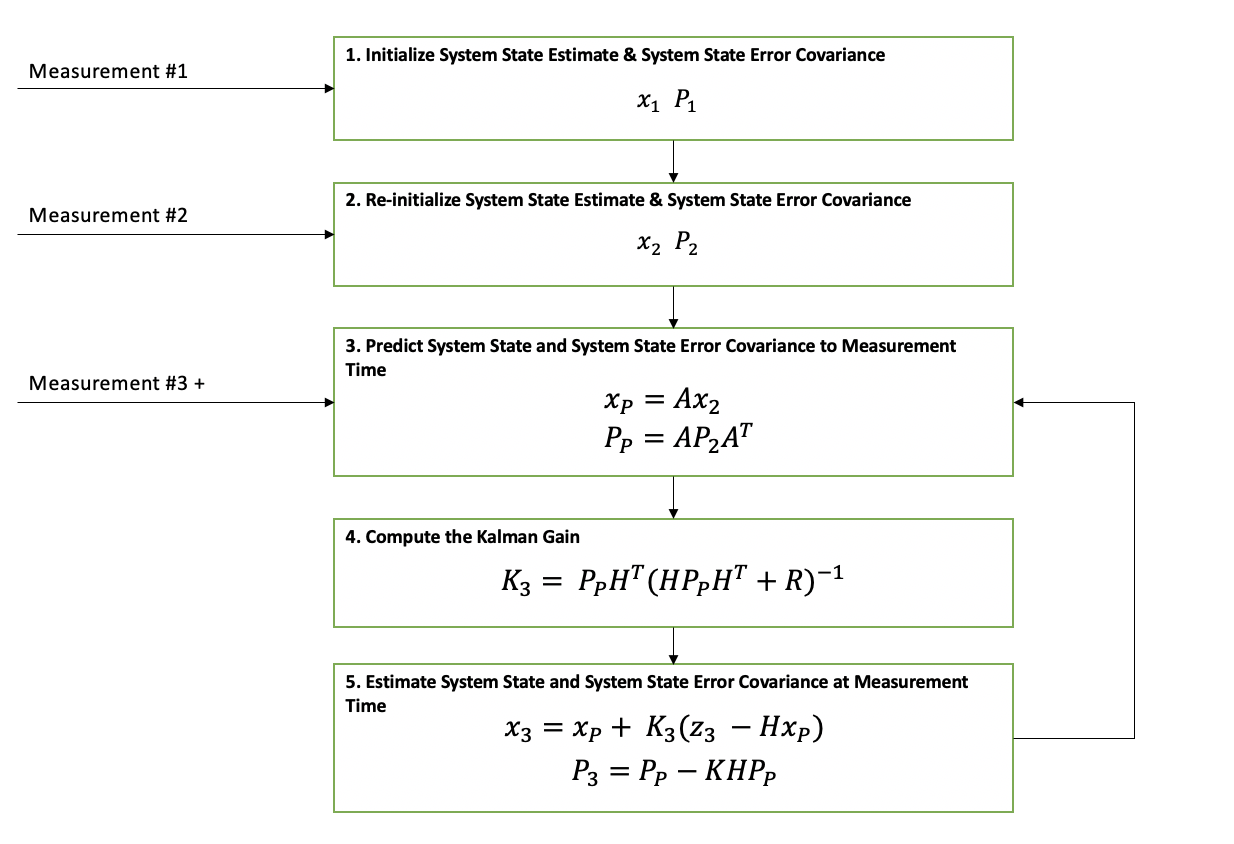
Run the extended Kalman filter. It defines the estimate of this system state at time zero which is the expected value of the true state and it also defines the uncertainty or the covariance of that initial state estimate. Filtering Problem Definition The Kalman filter is designed to operate on systems in linear state space format ie. From stonesouptypesstate import GaussianState prior GaussianState 0 1 0 1 npdiag 15 05 15 05 timestampstart_time Next iterate over hypotheses and place in a track. Q bgk I4. 11042019 In the following code I have implemented an Extended Kalman Filter for modeling the movement of a car with constant turn rate and velocity.
Filtering Problem Definition The Kalman filter is designed to operate on systems in linear state space format ie.
30012021 Now that you have input measurements to process with your filter its time to code up your python Kalman Filter. 26072014 Extended Kalman Filter Example With Code In this article we will look into using an Extended Kalman Filter EKF for estimating the state of a simulated moving vehicle. Denote xa ki the estimate at time k and ith iteration. Even though it might look like a small step this is the foundational algorithm for many of the advanced versions used for Sensor fusion technology. 3k 1 q bgk 1 T 2Sq 03. It defines the estimate of this system state at time zero which is the expected value of the true state and it also defines the uncertainty or the covariance of that initial state estimate. Next the code defines the true state of the system which will cosimulate along with the EKF in this example. Extended Kalman Filter EKF With Python Code Example In this tutorial we will cover everything you need to know about Extended Kalman Filters EKF. 26042018 Navigation with a global navigation satellite system GNSS will be provided as an implementation example of the Kalman filter. We can use a Kalman Filter to estimate the next pose of the car that uses the following. The code for this example is consolidated into one function.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site convienient, please support us by sharing this posts to your favorite social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title extended kalman filter example code by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.