Your Extended kalman filter python wallpapers are ready in this website. Extended kalman filter python are a topic that is being searched for and liked by netizens today. You can Find and Download the Extended kalman filter python files here. Find and Download all free photos and vectors in Site Adı. Extended kalman filter python was advised robust and image item.
If you’re searching for extended kalman filter python images information related to the extended kalman filter python topic, you have visit the right blog. Our site always gives you hints for refferencing the highest quality video and picture content, please kindly hunt and locate more enlightening video content and images that match your interests.
Extended Kalman Filter Python. The defaults will not give you a functional filter. The method takes an observation vector z k as its parameter and returns an updated state and covariance estimate. Measurement updates and motion updates. This is a sensor fusion localization with Extended Kalman FilterEKF. Combine The Extended Kalman Filter With Lqr Automatic Addison from automaticaddison.com
Lets assume our robot starts out at the origin x0 y0 and the yaw angle is 0 radians. Measurement updates and motion updates. The Code can be found here. The defaults will not give you a functional filter. The blue line is true trajectory the black line is dead reckoning trajectory the green point is positioning observation ex. In a way its a magically how with so little and noisy information it is able to reconstruct a complete system state.
The defaults will not give you a functional filter.
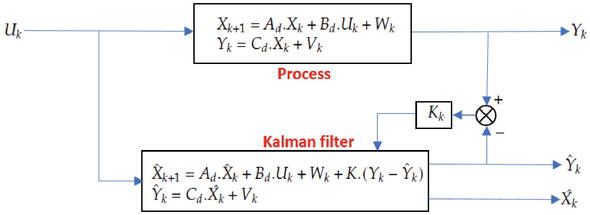
Class filterpykalmanExtendedKalmanFilter dim_x dim_z dim_u0 source. 24082018 x npadd x npmatmul K Y P npmatmul npsubtract I npmatmul K H P and with that you have gone through complete code for a Kalman Filter algorithm. The defaults will not give you a functional filter. Here is an example Python implementation of the Extended Kalman Filter. The Extended Kalman Filter is one of the most used algorithms in the world and this module will use it to compute the attitude as a quaternion with the observations of tri-axial gyroscopes accelerometers and magnetometers. Implements an extended Kalman filter EKF. You are responsible for setting the various state variables to reasonable values. This is a sensor fusion localization with Extended Kalman FilterEKF. To implement the extended Kalman filter we will leave the linear equations as they are and use partial derivatives to evaluate the system matrix F mathbfF F and the measurement matrix H mathbfH H at the state at time t x t mathbfx_t x t. The red ellipse is estimated covariance ellipse with EKF. The Code can be found here.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site serviceableness, please support us by sharing this posts to your own social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title extended kalman filter python by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.