Your Extended kalman filter udacity wallpapers are ready in this website. Extended kalman filter udacity are a topic that is being searched for and liked by netizens now. You can Find and Download the Extended kalman filter udacity files here. Get all royalty-free vectors in Site Adı. Extended kalman filter udacity was notified completly and detail.
If you’re looking for extended kalman filter udacity images information connected with to the extended kalman filter udacity interest, you have pay a visit to the right site. Our site frequently provides you with hints for viewing the highest quality video and image content, please kindly surf and find more informative video content and images that fit your interests.
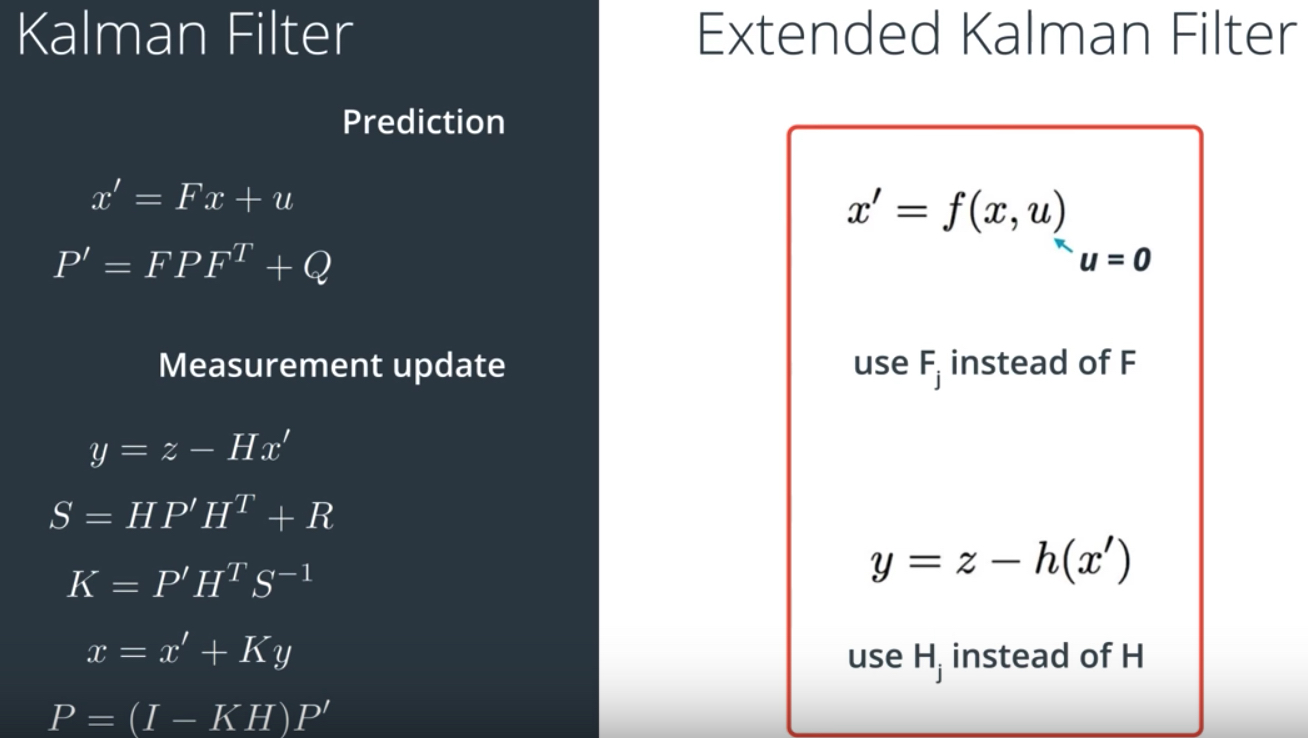
Extended Kalman Filter Udacity. 27022018 Extended Karman Filter Zhenglei 2018 January. 30052017 The Extended Kalman Filter attempts to solve such problems by linearizing the non-linear state transition functions using Taylor Expansion around the mean location of the original function. 3032017 Extended Kalman Filter Project Starter Code. Self-Driving Car Engineer Nanodegree Program. Extended Kalman Filter Simplified Udacity S Self Driving Car Nanodegree By Dhanoop Karunakaran Intro To Artificial Intelligence Medium from medium.com
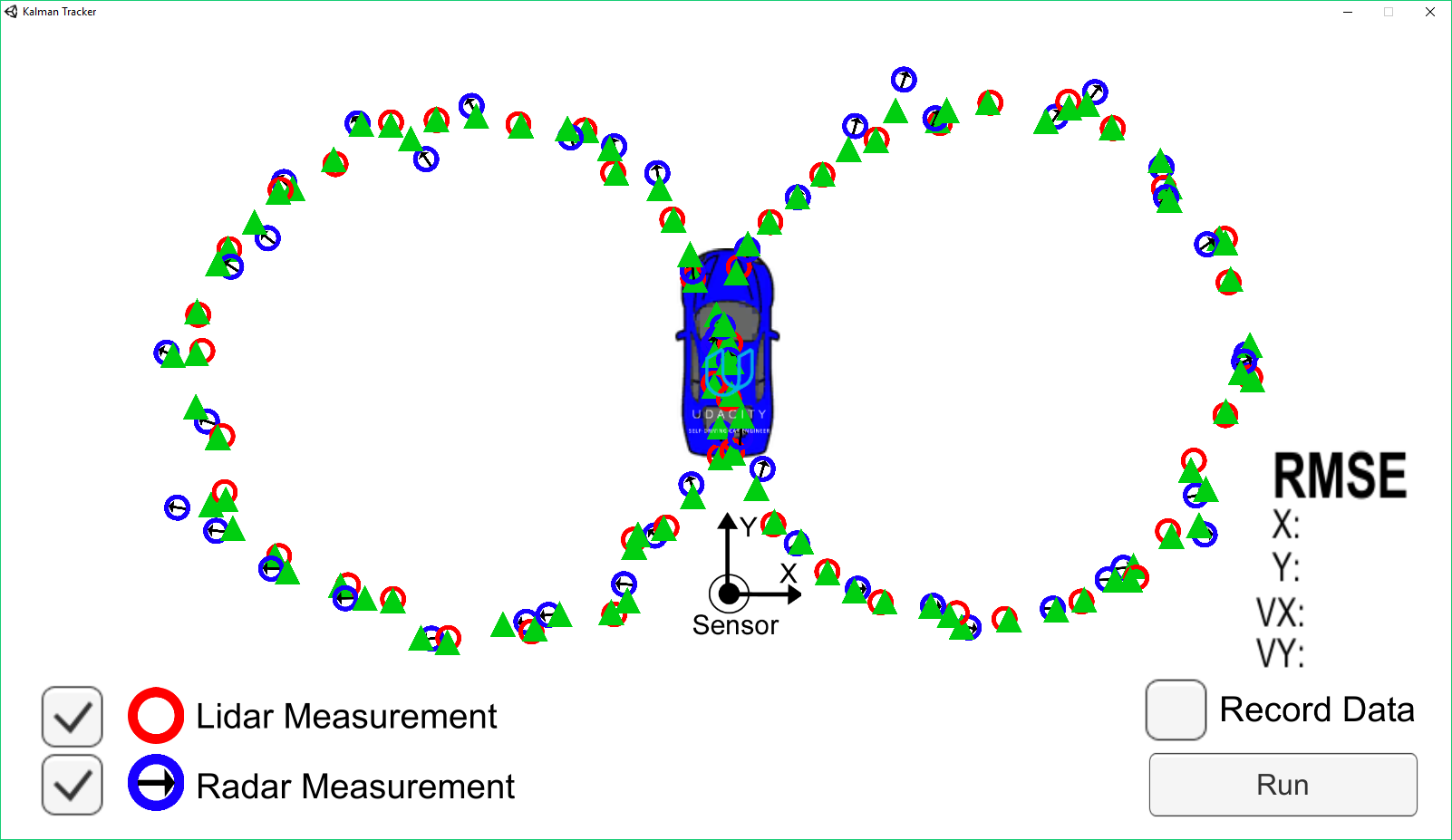
But in case of a Radar we need to apply Extended Kalman Filter because it includes angles that are non linear hence we do an approximation of the non linear function using first derivative of Taylor series called Jacobian Matrix Hⱼ. Float rho_pred sqrt pow px 2 pow py 2. 4062017 This is a discussion of how I solved the Extended Kalman Filters project in the Udacity Self-Driving Car Engineer Nanodegree. Both can see a pedestrian. Based on the lidar and radar data both a bit noisy keep track of the pedestrians position and velocity. The main goal of the project is to apply Extended Kalman Filter to fuse data from LIDAR and Radar sensors of a self driving car using C.
9022018 Extended Kalman Filter simplified Udacitys Self-driving Car Nanodegree.
Our car has two sensors. 30052017 The Extended Kalman Filter attempts to solve such problems by linearizing the non-linear state transition functions using Taylor Expansion around the mean location of the original function. Both EKF and UKF works well with noisy measurements. In addition the linearization requires that the Jacobian of the state transition is computed. This Project is the sixth task Project 1 of Term 2 of the Udacity Self-Driving Car Nanodegree program. Our car has two sensors. A lidar and a radar. The main goal of the project is to apply Extended Kalman Filter to fuse data from LIDAR and Radar sensors of a self driving car using C. 8042018 So in case of a LIDAR we will apply a Kalman Filter because the measurements from the sensor are Linear. And the results are expected because UKF uses UT instead of linearizing non-linear statemeasurement prediction functions here non. 9022018 Extended Kalman Filter simplified Udacitys Self-driving Car Nanodegree.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site helpful, please support us by sharing this posts to your favorite social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title extended kalman filter udacity by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.