Your Indirect kalman filter images are ready. Indirect kalman filter are a topic that is being searched for and liked by netizens today. You can Download the Indirect kalman filter files here. Find and Download all royalty-free vectors in Site Adı. Indirect kalman filter was narrated completly and detail.
If you’re looking for indirect kalman filter images information connected with to the indirect kalman filter keyword, you have pay a visit to the ideal site. Our website frequently provides you with hints for refferencing the maximum quality video and picture content, please kindly hunt and locate more informative video content and graphics that match your interests.
Indirect Kalman Filter. Engineering University of Minnesota Multiple Autonomous Robotic Systems Laboratory Technical Report Number 2005-002 March 2005 Dept. Cf batch processing where all data must be present. Kalman filters are often used to optimally estimate the internal states of a system in the presence of uncertain and indirect measurements. A Kalman filter is an optimal estimator - ie infers parameters of interest from indirect inaccurate and uncertain observations. Kalman Filtering Applied To Induction Motor State Estimation Intechopen from www.intechopen.com
External acceleration is estimated from the residual of the filter and compensated by increasing the measurement noise covariance. Roumeliotis Department of Computer Science. Moreover the mechanism is implemented in the device-driver layer providing lower process latency and transparency capabilities for the upper applications. Cf batch processing where all data must be present. Indirect Kalman Filter for 3D Attitude Estimation Nikolas Trawny and Stergios I. Indirect error state kalman filter.
Cf batch processing where all data must be present.
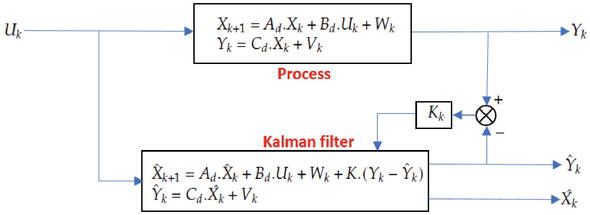
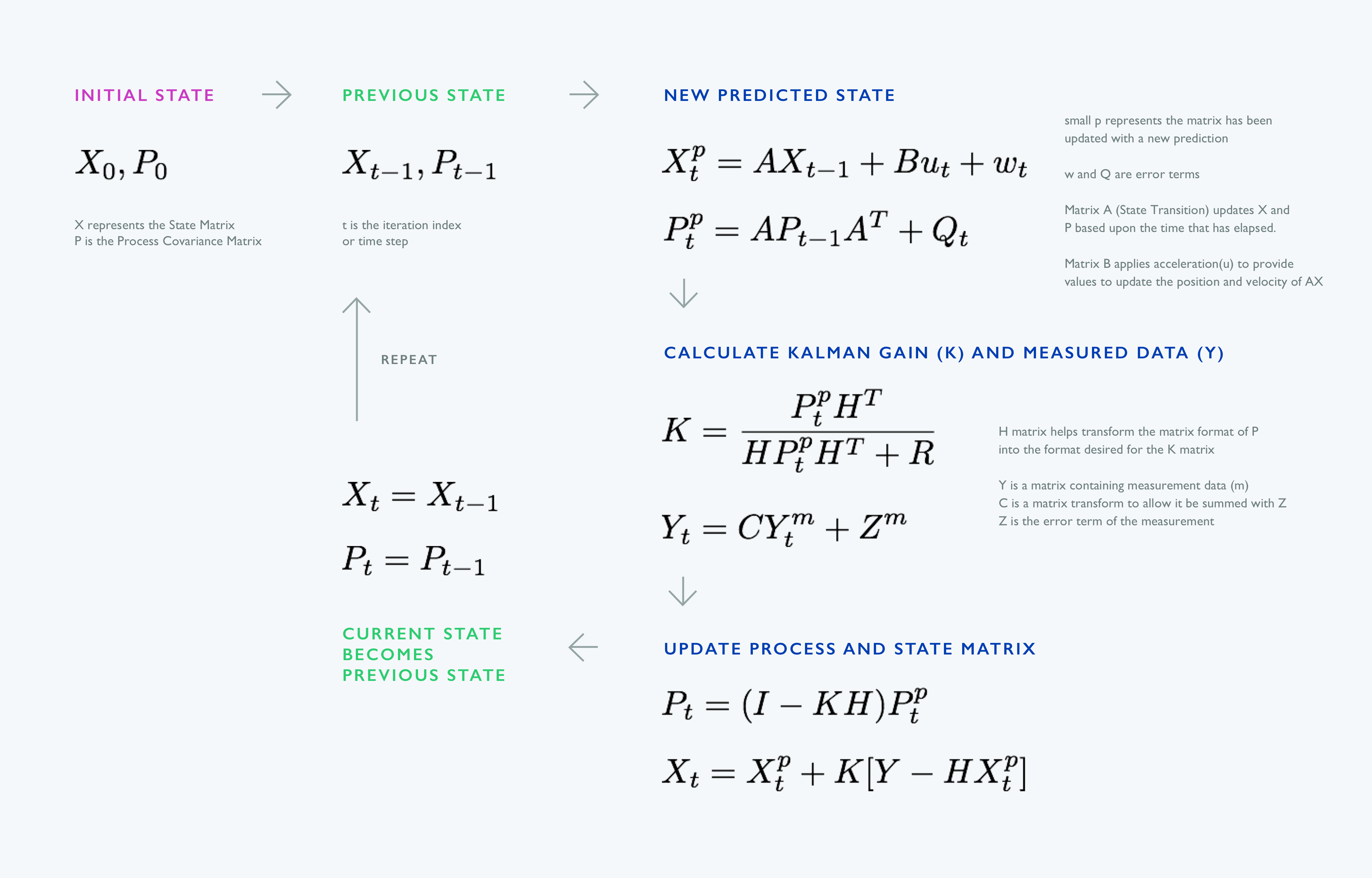
You will explore the situations where Kalman filters are commonly used. X F x G u wk k k k k k 1 1 1 1 1 1 y H x vk k k k 2 where the variable definitions and dimensions are detailed in Table 1. Indirect Kalman Filter for 3D Attitude Estimation Nikolas Trawny and Stergios I. Our mechanism focuses on addressing the issues of external feedback loops and non-gyro error elements contained in the state vectors of an indirect. As our first contribution the external acceleration is modeled as a first-order Gauss Markov model and its value is calculated under the indirect Kalman filter IKF framework. Engineering University of Minnesota Multiple Autonomous Robotic Systems Laboratory TR-2005-002 Rev. Kalman May 19 1930 July 2 2016. The most plausible definition I found is in Maybecks book 1. Ive found many publications and thesis on this topic but not too much code as example. Propagation of error state 0 Kalman Filter implementation to estimate position with IMU under high impacts and acceleration. Roumeliotis Department of Computer Science.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site value, please support us by sharing this posts to your preference social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title indirect kalman filter by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.