Your Kalman filter c implementation wallpapers are ready. Kalman filter c implementation are a topic that is being searched for and liked by netizens today. You can Find and Download the Kalman filter c implementation files here. Get all free photos in Site Adı. Kalman filter c implementation was notified holistic and detail.
If you’re looking for kalman filter c implementation images information related to the kalman filter c implementation interest, you have come to the ideal blog. Our site always gives you suggestions for seeking the maximum quality video and image content, please kindly hunt and find more enlightening video articles and images that fit your interests.
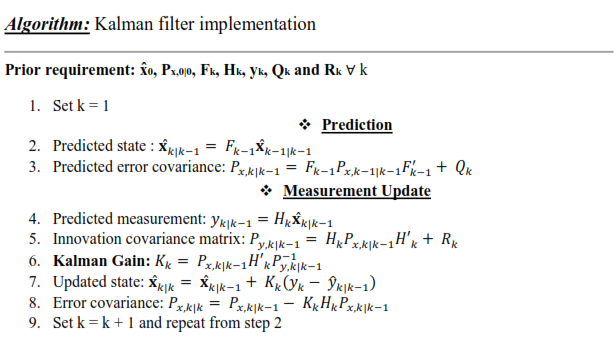
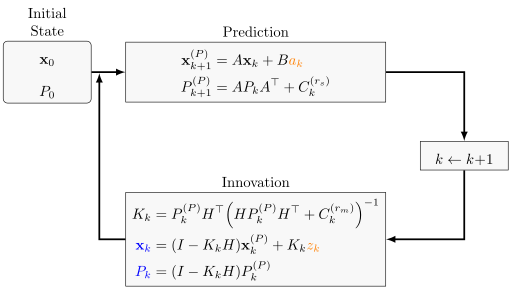
Kalman Filter C Implementation. Kalman Filter Implementation in C. If all noise is Gaussian the Kalman filter minimises the mean square error of the estimated parameters. It is a bit more advanced. K P HT H P HT R C. Kalman Filter Martin Thoma from martin-thoma.com
Kalman filters are useful when your input signal consists of noisy observations of some linear dynamical systems state. C - Kalman Filter Implementation. 27042020 In this article we will demonstrate a simple example on how to develop a Kalman Filter to measure the level of a tank of water using an ultrasonic sensor. Microcontroller targeted naive Kalman filter implementation in pure C using code ported from the Efficient Java Matrix Library. 31072015 Kalman Filter C Implementation. In this section we will be finally implementing the extended kalman filter.
1062001 Originally developed for use in spacecraft navigation the Kalman filter turns out to be useful for many applications.
K P HT H P HT R C. It implements the algorithm directly as found in An Introduction to the Kalman Filter httpwwwcsunceduwelchmediapdfkalman. This example shows how to generate C code for a MATLAB. It is recursive so that new measurements can be processed as they arrive. Kalman filter function kalmanfilter which estimates the position of a moving object based on past noisy measurements. Kalman filters are useful when your input signal consists of noisy observations of some linear dynamical systems state. 31072015 Kalman Filter C Implementation. Let us start by breaking it down. Kalman Filter Implementation with Improved Numerical Properties AbstractThis paper presents a new Kalman filter formthe sigmaRho filteruseful for operational implementation in applications where stability and throughput requirements stress traditional implementations. The necessary mathematical background is also provided in the tutorial. If all noise is Gaussian the Kalman filter minimises the mean square error of the estimated parameters.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site adventageous, please support us by sharing this posts to your preference social media accounts like Facebook, Instagram and so on or you can also bookmark this blog page with the title kalman filter c implementation by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.