Your Kalman filter c tutorial images are available. Kalman filter c tutorial are a topic that is being searched for and liked by netizens today. You can Get the Kalman filter c tutorial files here. Get all royalty-free vectors in Site Adı. Kalman filter c tutorial was narrated robust and detail.
If you’re searching for kalman filter c tutorial images information related to the kalman filter c tutorial interest, you have pay a visit to the right blog. Our website always provides you with hints for viewing the maximum quality video and image content, please kindly search and find more enlightening video content and images that fit your interests.
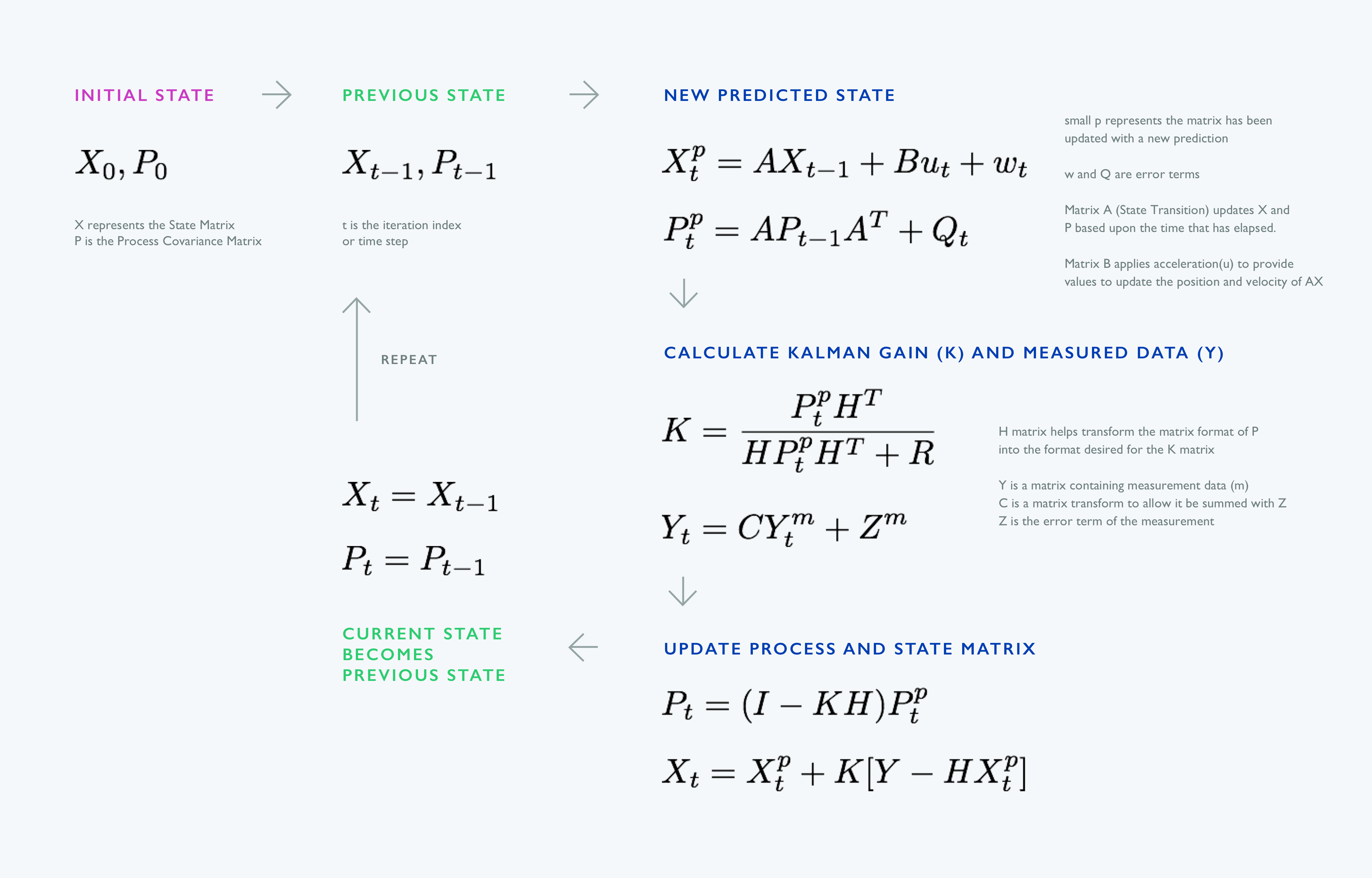
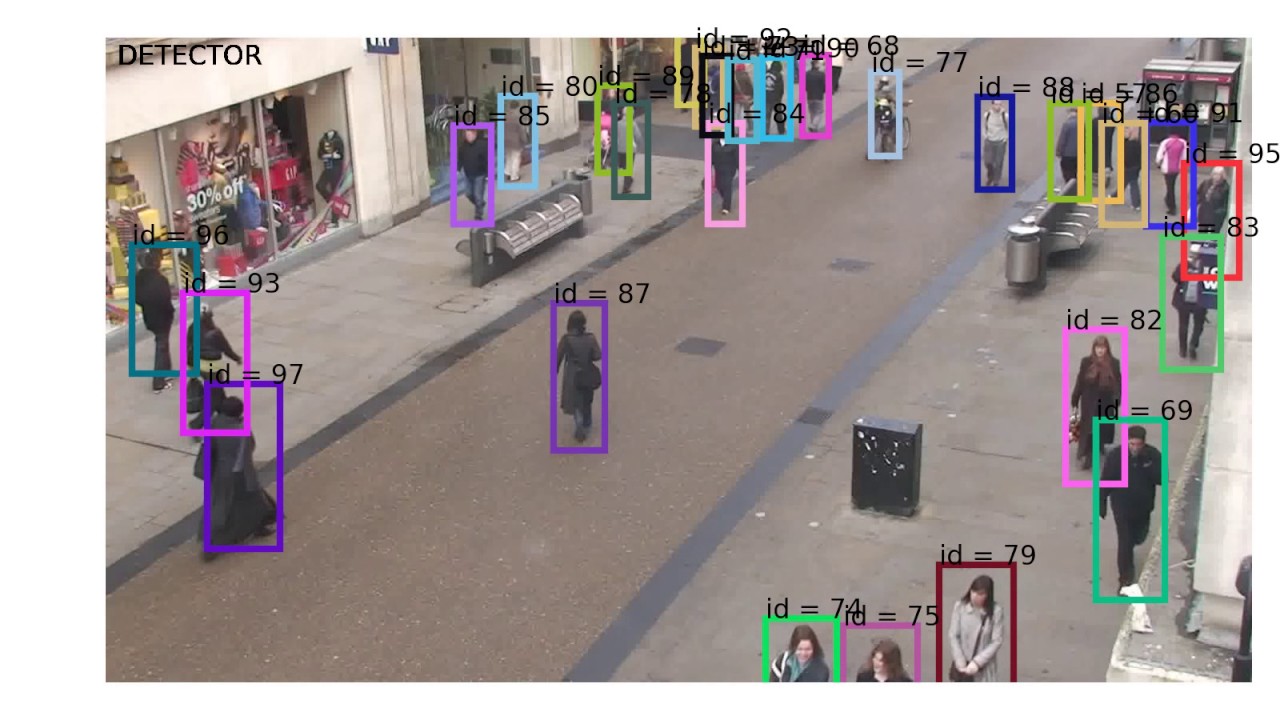
Kalman Filter C Tutorial. Subclassing allows to define different matrix contents for the filter to work with. Finally i came to know about Kalman Filter for object tracking. It explains the Kalman filter in a simple way and this following section transcribes this to this particular application. As well the Kalman Filter provides a prediction of the future system state based on the past estimations. Kalman Filter In One Dimension from www.kalmanfilter.net
Example we consider xt1 Axt wt with A 06 08 07 06 where wt are IID N0I eigenvalues of A are 06075j with magnitude 096 so A is stable we solve Lyapunov equation to find steady-state covariance. This is the Riccati equation and can be obtained from the Kalman filter equations above. The solution of the Riccati equation in a time invariant system converges to steady state finite covariance if the pair F H is completely observable ie. I still think its useful though to write your own code just to consolidate the knowledge. Its use in the analysis of visual motion has b een do cumen ted frequen tly. It has a known current position denoted by Χ τ-1 and its position is going to change by an unknown.
So lets implement a Kalman filter in C.
I am new on OpenCV. 10092018 The extended kalman filter is simply replacing one of the the matrix in the original original kalman filter with that of the Jacobian matrix since the system is now non-linear. The Kalman lter 1 has long b een regarded as the optimal solution to man y trac king and data prediction tasks 2. In my case I declared all variables locally so they could be accessed by the function but there are more elegant ways to. A Kalman filter also acts as a filter but its operation is a bit more complex and harder to understand. Finally i came to know about Kalman Filter for object tracking. I am always wish to learn new image processing technologies Programming. It explains the Kalman filter in a simple way and this following section transcribes this to this particular application. Configurable template classes are available. 15072020 The filter you just implemented is in python and that too in 1-D. I wish to learn the same and try to make my own similar project.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site serviceableness, please support us by sharing this posts to your own social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title kalman filter c tutorial by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.