Your Kalman filter equations wallpapers are ready. Kalman filter equations are a topic that is being searched for and liked by netizens today. You can Get the Kalman filter equations files here. Find and Download all royalty-free vectors in Site Adı. Kalman filter equations was covered holistic and detail.
If you’re looking for kalman filter equations pictures information related to the kalman filter equations keyword, you have visit the right blog. Our site frequently gives you suggestions for seeking the maximum quality video and picture content, please kindly hunt and find more informative video articles and images that match your interests.
Kalman Filter Equations. Smoothing Like the ltered posterior distribution Pxtjfygt 1 the smoothed posterior distribution PxtjfygT 1 is also normal. Its associated variance-covariance matrix for the estimate is represented by a 4-by-4 matrix P. We seek its mean xT t and variance VtT. K P HT H P HT R C. 2 The Extended Kalman Filter Ekf from homepages.inf.ed.ac.uk
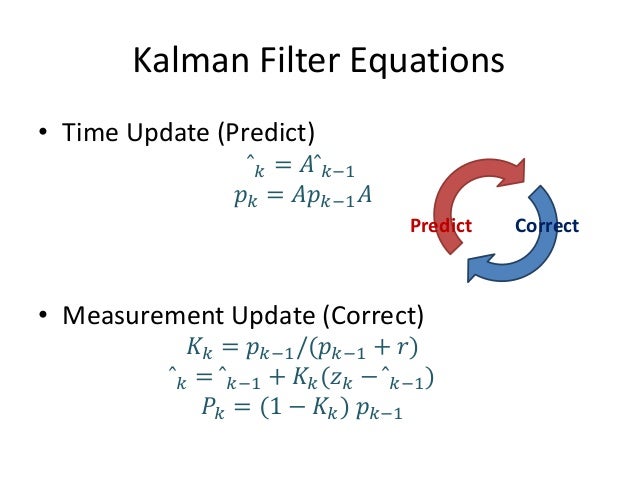
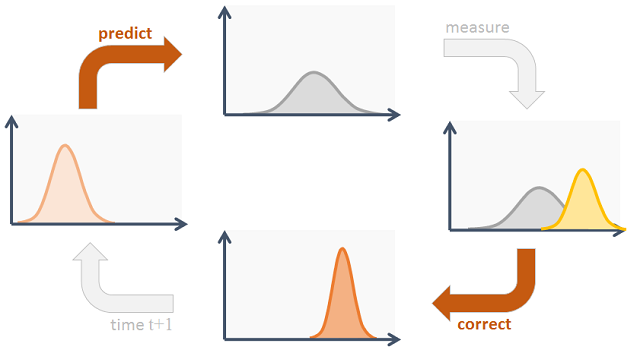
Y Z H X b. There is a simple straightforward derivation that starts with the assumptions of the Kalman filter and requires a little Algebra to arrive at the update and extrapolation equations as well as some properties regarding the measurement residuals difference between the. X x x x k k k z k z k k k k z k z k estimate of given measuremen ts estimate of given measuremen ts 1 1 1 1 and the error covariance matrix of the state estimate P x P x. Kalman Filter Equations The Kalman filter maintains the estimates of the state. Any xk is a linear combination of its previous value plus a control signal k and. Kalman filter measurement and time updates together give a recursive solution start with prior mean and covariance xˆ01 x0 Σ01 Σ0 apply the measurement update xˆtt ˆxtt1 Σtt1C T CΣtt1C T V 1 yt Cxˆtt1 Σtt Σtt1 Σtt1C T CΣtt1C T V 1 CΣtt1 to get xˆ00 and Σ00.
2 4 x.
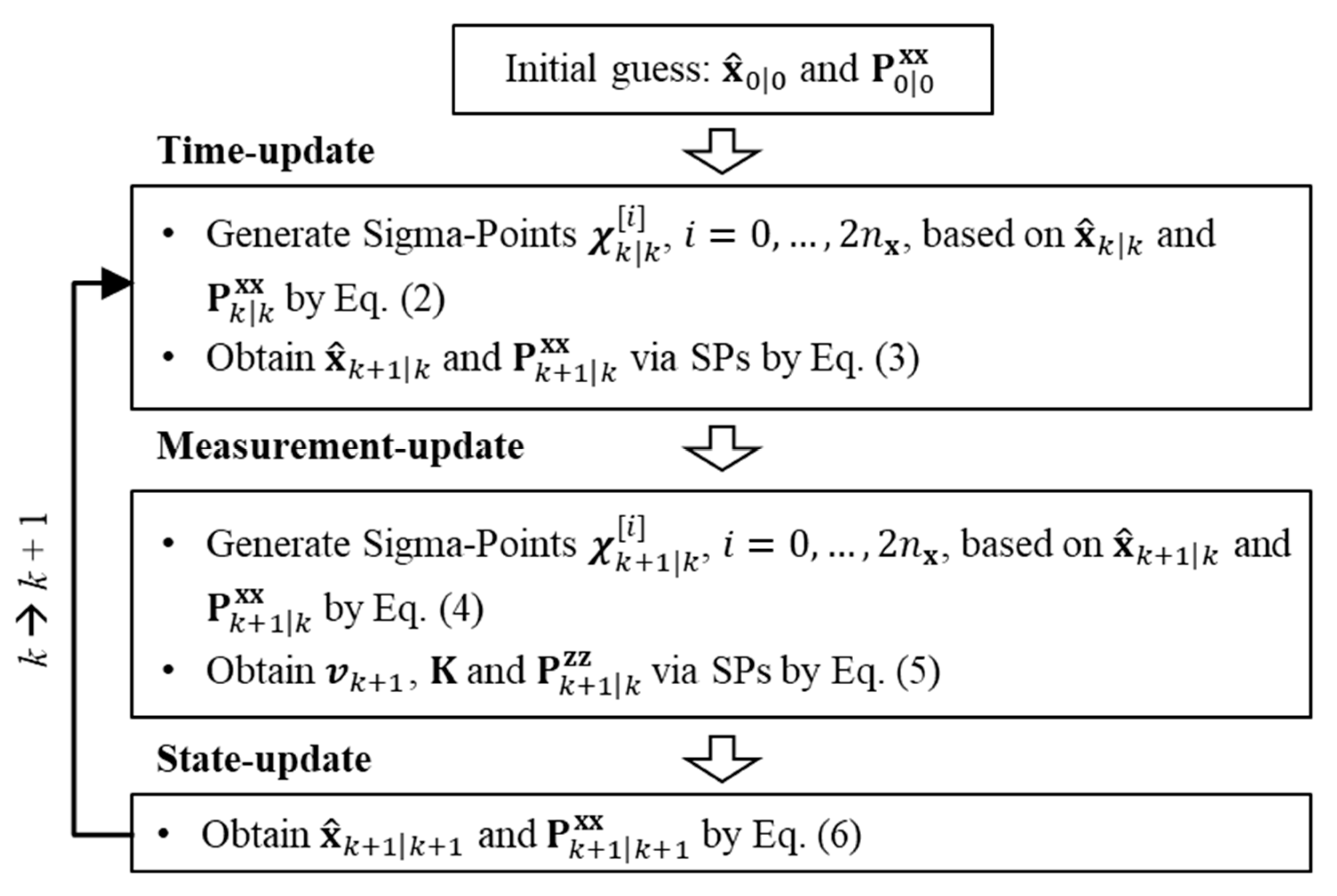
Equation 18 represents the Kalman gain in one popular form. It means that each xk our signal values may be evaluated by using a linear stochastic equation the first one. K P HT H P HT R C. S k HP 0 H T R 1128 Finally substitution of equation 1127 in to 1123 giv es. Thus the Kalman filters success depends on our estimated values and its variance from the actual values. In estimation theory the extended Kalman filter EKF is the nonlinear version of the Kalman filter which linearizes about an estimate of the current mean and covariance. We shall compute x kPk and x. 2 4 x. Its associated variance-covariance matrix for the estimate is represented by a 4-by-4 matrix P. K Mk 3 5 where Mk 4 H kP. We develop the Extended Kalman filter by starting with a denoted.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site serviceableness, please support us by sharing this posts to your own social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title kalman filter equations by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.