Your Kalman filter lecture images 4K are ready in this website. Kalman filter lecture are a topic that is being searched for and liked by netizens now. You can Download the Kalman filter lecture files here. Download all royalty-free photos in Site Adı. Kalman filter lecture was narrated completly and item by item.
If you’re searching for kalman filter lecture images information linked to the kalman filter lecture interest, you have come to the ideal site. Our site always gives you suggestions for viewing the highest quality video and picture content, please kindly search and locate more informative video articles and graphics that fit your interests.
Kalman Filter Lecture. In 1960 Kalman published his famous paper describing a. Recursions for the variance Summary of Kalman lter Simpli cations To make the derivations more direct assume that the two noise processes are uncorrelated S t 0 with constant variance matrices Q t QR t R. Kalman Filter Xk h xk xk yk yk zkzk iT Xk h xk yk vk θk iT Example of process states Efficient way to estimate the states of a process Supports estimation of past present and future states Needs a good mathematical model of the process Often kinematic or dynamic models are used Observations are used to form better estimates Observations are. The Kalman filter is designed to operate on systems in linear state space format ie. Assimilation Algorithms Ensemble Kalman Filters Massimo Bonavita Ecmwf from slidetodoc.com
As well the Kalman Filter provides a prediction of the future system state based on the past estimations. 1Simple 1D example tracking the level in a tank this pdf 2Integrating disparity using known ego-motion in MI64 Page 1 September 2008. Lecture notes The University of Utah 2013. For the Kalman filter algorithm we had been able to write the motion model in the following way. 4 References for these lectures available at wwwmygeodesyidau in the folder Least Squares. Kalman Filter Xk h xk xk yk yk zkzk iT Xk h xk yk vk θk iT Example of process states Efficient way to estimate the states of a process Supports estimation of past present and future states Needs a good mathematical model of the process Often kinematic or dynamic models are used Observations are used to form better estimates Observations are.
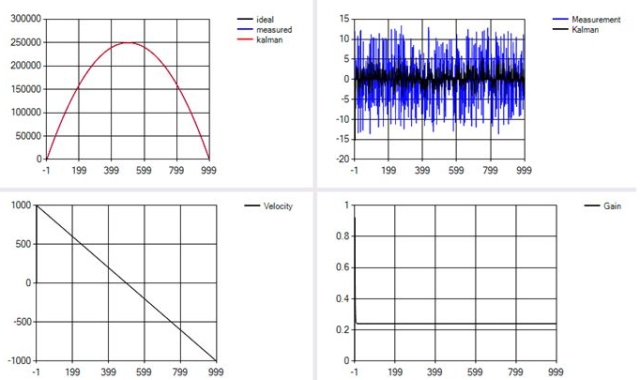
But these measurements are noisy.
111 In tro duction The Kalman lter 1 has long b een regarded as the optimal solution to man y trac king and data prediction tasks 2. Then we start the actual subject with C specifying linear dynamic systems defined in continuous space. This lecture will help you understand some direct applications of the Kalman filter using numerical examples. Kalman Filter - Intro Structure of Presentation We start with A discussing briefly signals and noise and B recalling basics about random variables. In 1960 Kalman published his famous paper describing a. Kalman Filter Overview 1. Extended Kalman Filter Lecture Notes 1 Introduction 2 DiscreteDiscrete EKF k k k k j k R k k R k R k R k k R k k k R k k R k In this lecture note we extend the Kalman Filter to non-linear system models to obtain an approximate filterthe Extended Kalman Filter. The Kalman Filter produces estimates of hidden variables based on inaccurate and uncertain measurements. Lecture notes The University of Utah 2013. 111 In tro duction The Kalman lter 1 has long b een regarded as the optimal solution to man y trac king and data prediction tasks 2. 1Simple 1D example tracking the level in a tank this pdf 2Integrating disparity using known ego-motion in MI64 Page 1 September 2008.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site convienient, please support us by sharing this posts to your preference social media accounts like Facebook, Instagram and so on or you can also bookmark this blog page with the title kalman filter lecture by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.