Your Kalman filter math images HD are available. Kalman filter math are a topic that is being searched for and liked by netizens today. You can Get the Kalman filter math files here. Find and Download all royalty-free photos in Site Adı. Kalman filter math was informed completly and detail.
If you’re looking for kalman filter math pictures information linked to the kalman filter math interest, you have pay a visit to the right site. Our website frequently gives you hints for refferencing the highest quality video and picture content, please kindly hunt and find more enlightening video content and images that fit your interests.
Kalman Filter Math. Supports Net Framework 40 or higher and Net Standard 13 or higher on Windows Linux and Mac. For example if you are filtering data from a cars speedometer then its inertia give you a right to treat a big speed deviation as a measuring error. To do so we will go back to our first tracking problem - tracking a dog in a hallway. The standard Kalman lter deriv ation is giv. Bilgin S Blog Kalman Filter For Dummies Kalman Filter Orbital Mechanics Filters from www.pinterest.com
Kalman Filter is a type of prediction algorithm. X F x G u wk k k k k k 1 1 1 1 1 1 y H x vk k k k 2 where the variable definitions and dimensions are detailed in Table 1. Public class KalmanFilter extends Object. The main idea behind this that one should use an information about the physical process. Kalman Filter is one of the most important and common estimation algorithms. Its use in the analysis of visual motion has b een do cumen ted frequen tly.
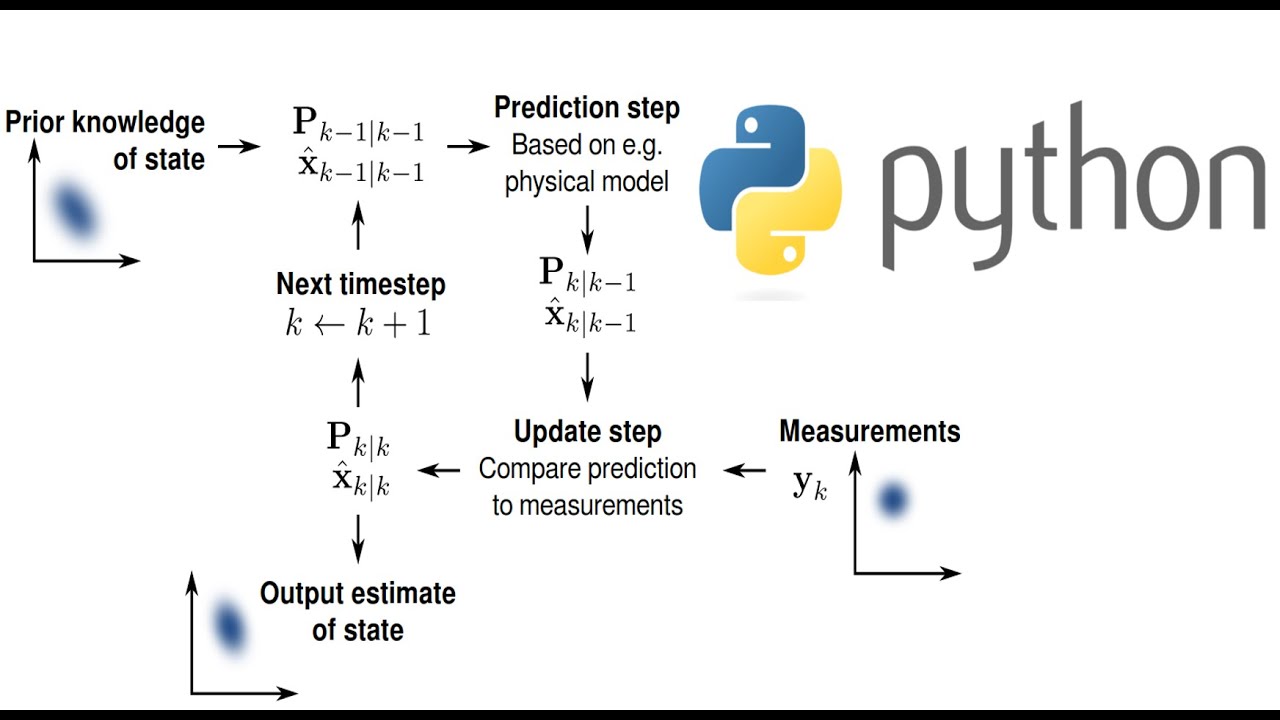
The Kalman Filter uses a predictor-corrector structure in which if a measurement of the system is available at time we first call the Predict function to estimate the state of the system at time.
We will see how to use a Kalman filter to track it CSE 466 State Estimation 3 0 20 40 60 80 100 120 140 160 180 200-2-1 0 1 Position of object falling in air Meas Nz Var 00025 Proc Nz Var 00001 observations Kalman output true dynamics 0 20 40 60 80 100 120 140 160 180 200-15-1-05 0 Velocity of object falling in air observations Kalman output. When the ball is detected the Kalman filter first predicts its state at the current video frame and then uses the newly detected object location to correct its state. Supports Net Framework 40 or higher and Net Standard 13 or higher on Windows Linux and Mac. Kalman Filter T on y Lacey. Public class KalmanFilter extends Object. KalmanFilter Apache Commons Math 36 API javalangObject. The Kalman filter is a clever method for computing xˆtt and xˆt1t recursively The Kalman filter 813. 111 In tro duction The Kalman lter 1 has long b een regarded as the optimal solution to man y trac king and data prediction tasks 2. Its use in the analysis of visual motion has b een do cumen ted frequen tly. The standard Kalman lter deriv ation is giv. The Kalman Filter produces estimates of hidden variables based on inaccurate and uncertain measurements.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site serviceableness, please support us by sharing this posts to your preference social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title kalman filter math by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.