Your Kalman filter matlab implementation images 4K are ready in this website. Kalman filter matlab implementation are a topic that is being searched for and liked by netizens now. You can Find and Download the Kalman filter matlab implementation files here. Download all free vectors in Site Adı. Kalman filter matlab implementation was notified completly and detail.
If you’re searching for kalman filter matlab implementation pictures information linked to the kalman filter matlab implementation topic, you have visit the ideal blog. Our site frequently provides you with suggestions for refferencing the maximum quality video and image content, please kindly search and find more enlightening video articles and graphics that match your interests.
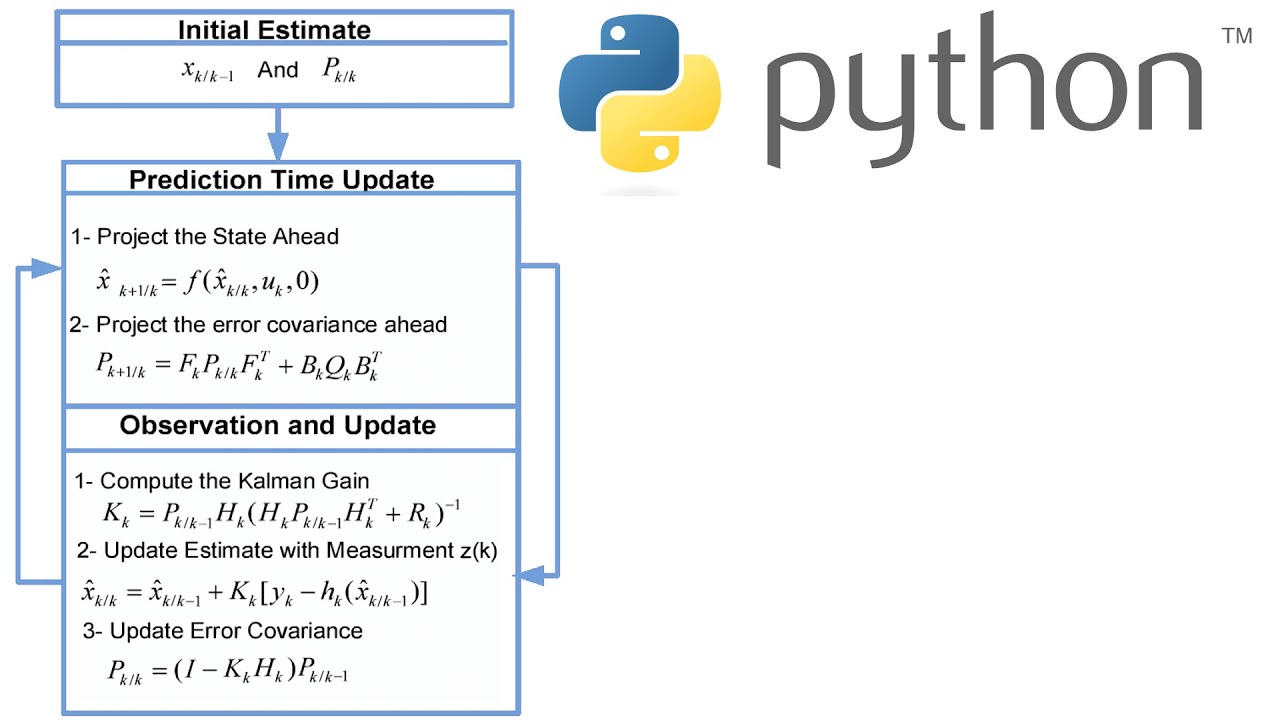
Kalman Filter Matlab Implementation. 24092012 The Standard Kalman Filter is the most basic KF implementation. 1960 und 1961 veroffentlichte Rudolf Emil Kalmen seine Arbeiten uber einen rekursiven pradiktiven Filter der auf dem Gebrauch von rekursiven Algorithmen basiert. The last two implementations include calculation of the kalman gain. It assumes a model that the noisy measurements contain the true system state plus white noise. Digital Ivision Labs Motion Tracking Detection In Matlab Using Kalman Filter from www.divilabs.com
It processes all available measurements regardless of their precision to estimate the current value of the variables of interest with use of knowledge of the system and measurement device. The HC-SR04 has an acoustic receiver and transmitter. I want to refresh my kalman filter knowledge but I am not able to make it work. One of the aspect of this optimality is that the Kalman filter incorporates all the information that can be provided to it. 1092016 The first uses the kalman function in control system toolbox to design a steady state kalman filter. With the framework above if you derive the updating equations for the kalman filter you will obtain the exponential smoothing update for the state and y t x t as update for the measurement.
Where ϵ t and γ t are independent normal error terms.
Browse other questions tagged matlab filter signals filtering kalman-filter or ask your own question. One of the aspect of this optimality is that the Kalman filter incorporates all the information that can be provided to it. Discrete Time Kalman Filter. The so-called factored-form Kalman filter KF implementations are designed to deal with the problem of numerical instability of the conventional KF. Detailed Tutorial on Kalman Filtering Techniques in Matlab. Universitt Stuttgart Institute of Geodesy Kalman Filtering Implementation with Matlab Study Report in the Field of Study Geodesy and Geoinformatics at Universitt Stuttgart Rachel Kleinbauer. This produces a filtered location. Get 22 Point immediately by PayPal. And the update will use Bayes rule which is nothing else but a product or a multiplication. 10Points 20 22Points 40 9 off 65Points 100 33 off. A Kalman filter is an optimal recursive data processing algorithm.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site good, please support us by sharing this posts to your own social media accounts like Facebook, Instagram and so on or you can also bookmark this blog page with the title kalman filter matlab implementation by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.