Your Kalman filter position estimation images 4K are ready. Kalman filter position estimation are a topic that is being searched for and liked by netizens now. You can Get the Kalman filter position estimation files here. Download all free vectors in Site Adı. Kalman filter position estimation was reported completly and image item.
If you’re searching for kalman filter position estimation images information related to the kalman filter position estimation keyword, you have visit the ideal blog. Our site always gives you suggestions for refferencing the highest quality video and image content, please kindly hunt and locate more informative video content and graphics that match your interests.
Kalman Filter Position Estimation. The Constraint Kalman Filter is implemented for spacecraft formation flying absolute positions estimation. If certain conditions are met a Kalman filter is optimal. Kalman Filter-Based Estimation A state estimation algorithm determines the values of a number of parameters of a system such as its position and velocity from measurements of the properties of that system. B Measurement Get readings from sensor regarding position of vehicle and compare it with Prediction C Update Update our knowledge about position or. Automatic Driving Positioning System Unscented Kalman Filter Develop Paper from developpaper.com
So the equation is. 25042013 For example the Wikipedia example specifies the H matrix as H 1 0 which means that only position is input. 22092009 A KalmanParticle Filter-Based Position and Orientation Estimation Method Using a Position SensorInertial Measurement Unit Hybrid System. B Measurement Get readings from sensor regarding position of vehicle and compare it with Prediction C Update Update our knowledge about position or. B k is the control-input model which is applied to the control vector u k. We characterize the statistical convergence of the expected estimation.
I try to use Kalman filter in order to estimate the position.
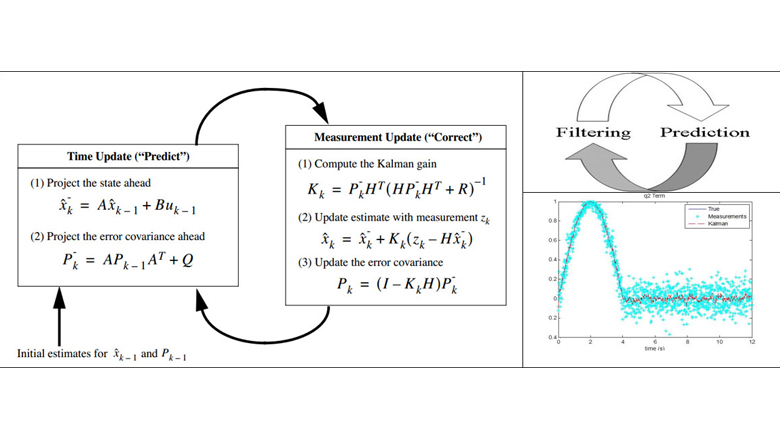
In dynamic positioning of ships where the Kalman Filter estimates the position and the speed of the vessel and also environmental forces. A Kalman Filter is an iterative mathematical process which uses a set of equations and consecutive data inputs in order to estimate the true position velocity etc of an object when the measured values contain uncertainties or errors. The Kalman Filter has many applications eg. B k is the control-input model which is applied to the control vector u k. W k is the process noise which is assumed to be drawn from a zero mean multivariate normal distribution with. It is recursive so that new measurements can be processed as they arrive. A Predict Based on previous knowledge of a vehicle position and kinematic equations we predict what should be the position of vehicle after time t1. If the target velocity is constant as you indicate that can be modeled and used by the Kalman filter. The velocity is not stable the system movement is like a cosine in general. Kalman filter is widely used in control systems to estimate the state of a process in. We generalize the most ubiquitous recursive estimation technique in controlthe discrete Kalman filter 7modelling the arrival of an observation as a random process whose parameters are related to the characteristics of the communication channel see Figure 1.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site value, please support us by sharing this posts to your own social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title kalman filter position estimation by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.