Your Kalman filter raspberry pi images are available. Kalman filter raspberry pi are a topic that is being searched for and liked by netizens today. You can Find and Download the Kalman filter raspberry pi files here. Find and Download all royalty-free photos in Site Adı. Kalman filter raspberry pi was advised robust and item by item.
If you’re searching for kalman filter raspberry pi pictures information linked to the kalman filter raspberry pi topic, you have come to the right blog. Our site frequently provides you with hints for downloading the maximum quality video and image content, please kindly search and find more informative video articles and graphics that fit your interests.
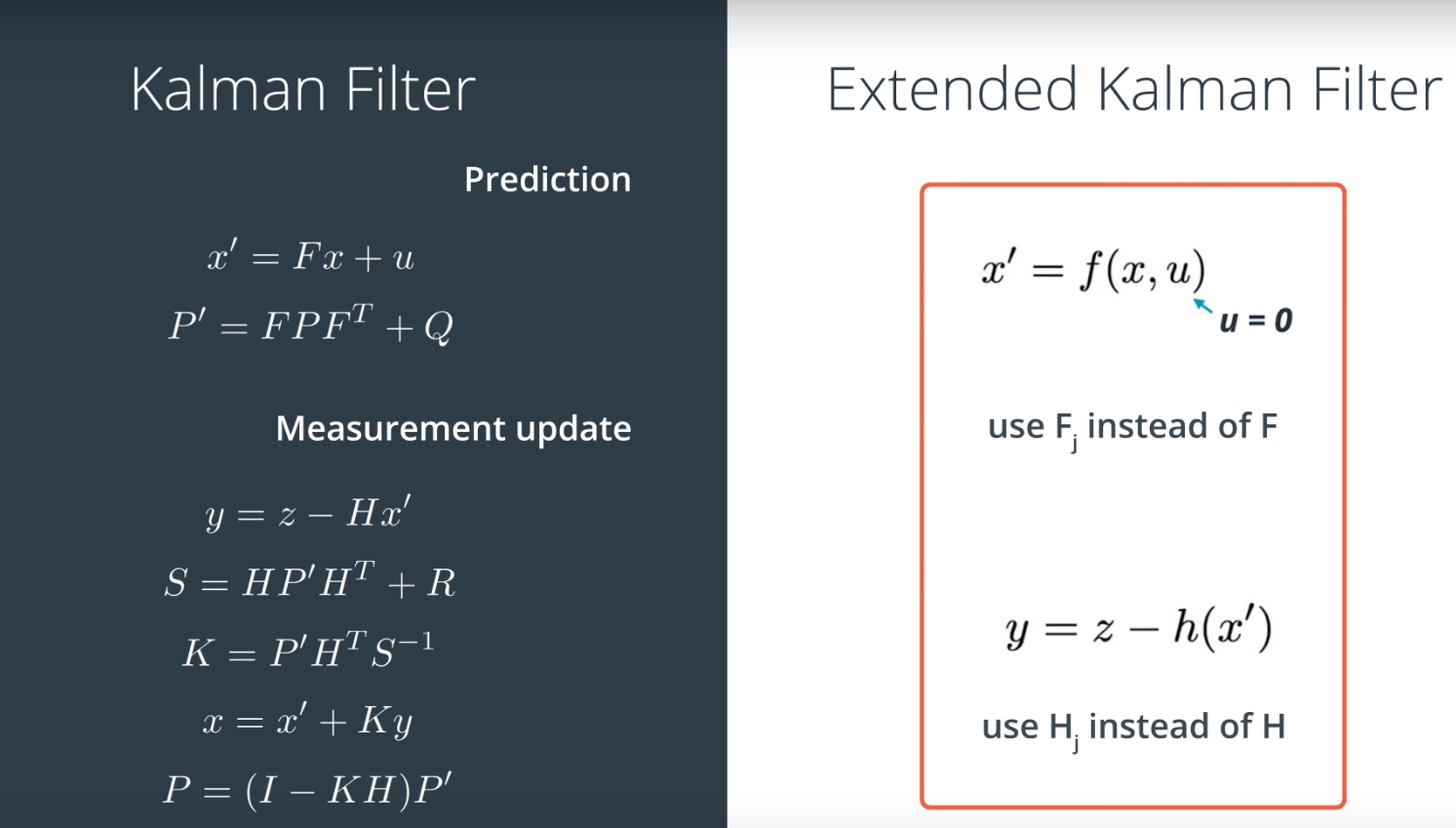
Kalman Filter Raspberry Pi. The Kalman Filter is a unsupervised algorithm for tracking a single object in a continuous state space. Prediction model involves the actual system and the process noise The update model involves updating the predicated or the estimated value with the observation noise. Sketch - Include Library - Add Zip Library. 18042018 Kalman Filter works on prediction-correction model used for linear and time-variant or time-invariant systems. Stabilize Sensor Readings With Kalman Filter Kalman Filter Sensor Filters from www.pinterest.com
You can use this for LTI systems since the Kalman gain and covariance converge to a fixed value. Hardware ESP32 33V connect LDR Vcc ESP32 GND connect LDR GND ESP32 G34ADC pin connect LDR A0 3. Software I will use the Kalman Filter here download as zip file. Sketch - Include Library - Add Zip Library. Get current filter values from file with openkalmantxt r as f. The calculation of this library is similar to the reference.
Kalman May 19 1930 July 2 2016.
As well the Kalman Filter provides a prediction of the future system state based on the past estimations. The filter is named after Rudolf E. Precompute these and assign them explicitly or run the Kalman filter using the normal predictupdate0. I am writing this article because I could not find any in internet that guide us to use MPU6050 to find angle with raspberry pi using python. So using the low pass filter hw from IMU andor sw from this code I can reduce the noise of the ACC. Here you can find the code called IMU_test2 including the low pass filter and the kalman filter. I2C communication protocol forked from cityofedens cosmic repo. Note it could be necessary to install the python library numpy on raspberry pi. The modified angle superscript m that gets fed into the Kalman filter is then α m α s r 2 π. Common uses for the Kalman Filter include radar and sonar tracking and state estimation in robotics. Kalman gain is calculated based on RLS algorithm in order to reach.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site value, please support us by sharing this posts to your own social media accounts like Facebook, Instagram and so on or you can also bookmark this blog page with the title kalman filter raspberry pi by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.