Your Kalman filter robotics wallpapers are ready in this website. Kalman filter robotics are a topic that is being searched for and liked by netizens now. You can Find and Download the Kalman filter robotics files here. Download all royalty-free images in Site Adı. Kalman filter robotics was covered robust and image item.
If you’re looking for kalman filter robotics images information linked to the kalman filter robotics interest, you have visit the right blog. Our site frequently provides you with hints for downloading the highest quality video and image content, please kindly surf and find more informative video articles and graphics that fit your interests.
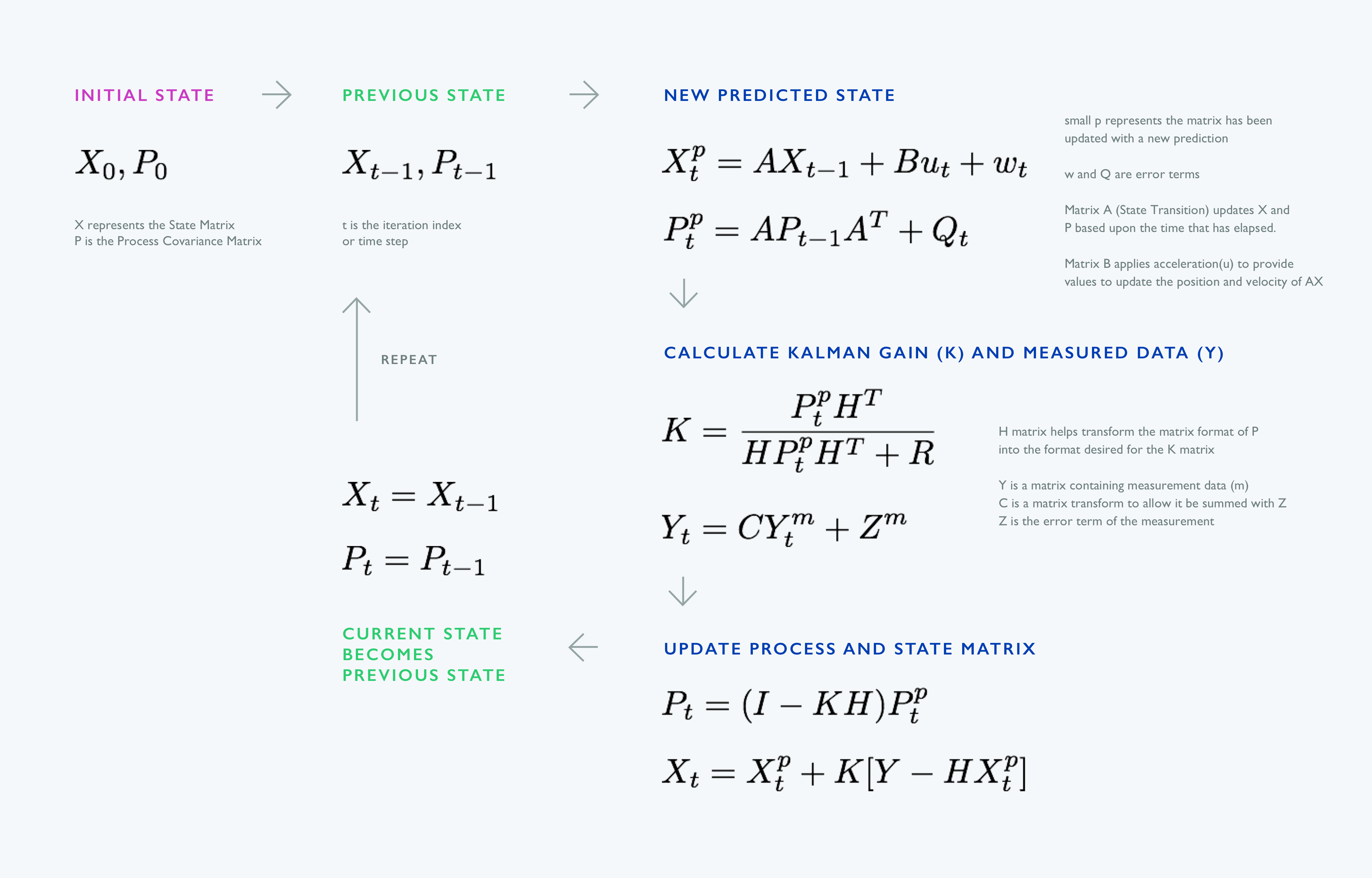
Kalman Filter Robotics. The Kalman filter algorithm. This is great because the system model is right above. Before going into any more details on the Kalman filter it is time for a brief disclaimer. I We just need to compute its mean and covariance. Introduction To Random Signals And Applied Kalman Filtering With Matlab Exercises 4th Edition Solutions Manual Brown How To Apply Good Grades College Textbook from www.pinterest.com
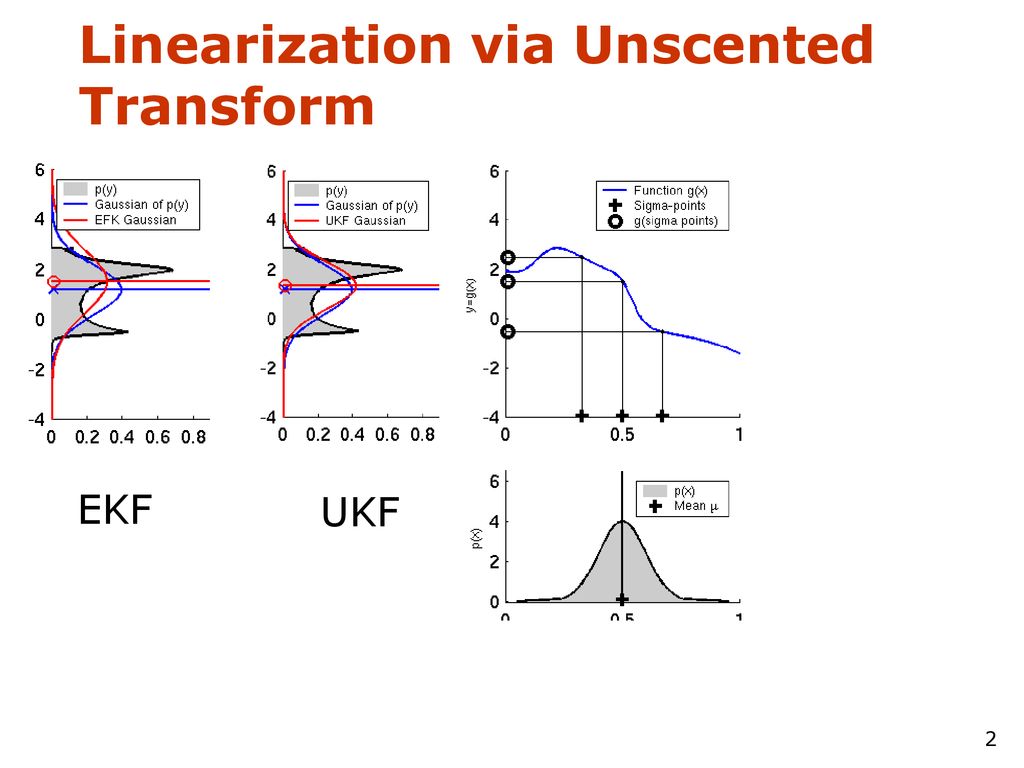
EKF generates more accurate estimates of the state than using just actual measurements alone. The Kalman filter 84. Forward kinematics of even the simplest robots are mostly non-linear and so are observation models that relate sensor observations and the robot. The Kalman Filter is an optimal observer of the state for linear systems under Gaussian noise It is a Bayesian Filter that operates in a closed Gaussian world by estimating the parameters of the state distribution as new measurements and controls become. Scandaroli and Roberto S. Matrix nxl that describes how the control u t changes the state from t-1 to t.
In fact the variance update in the Kalman filter is exactly the same as we learned during error propagation.
25022021 E KF was designed to enable the Kalman filter to apply in non-linear motion systems such as robots. In this field Kalman Filters are one of the most important tools that we can use. Forward kinematics of even the simplest robots are mostly non-linear and so are observation models that relate sensor observations and the robot. The Kalman Filter KF is a set of mathematical equations that when operating together implement a predictor-corrector type of estimator that is optimal in the sense that it minimizes the estimated error covariance when some presumed conditions are met. One of the most common problems in robot navigation is knowing where your robot is localized in the environment known as robot localization. J I Since w t and x t are independent and the Gaussian distribution is stable we know that the distribution of x t1 is Gaussian. The Kalman filter algorithm. Cf batch processing where all data must be present. Example we consider xt1 Axt wt with A 06 08 07 06 where wt are IID N0I eigenvalues of A are 06075j with magnitude 096 so A is stable we solve Lyapunov equation to find steady-state covariance. 25022021 E KF was designed to enable the Kalman filter to apply in non-linear motion systems such as robots. Matrix kxn that describes how to map the state x t to an observation z t.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site good, please support us by sharing this posts to your preference social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title kalman filter robotics by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.