Your Kalman filter sensor fusion code wallpapers are available. Kalman filter sensor fusion code are a topic that is being searched for and liked by netizens today. You can Find and Download the Kalman filter sensor fusion code files here. Find and Download all royalty-free vectors in Site Adı. Kalman filter sensor fusion code was advised completly and item by item.
If you’re looking for kalman filter sensor fusion code images information related to the kalman filter sensor fusion code keyword, you have pay a visit to the right site. Our site always gives you hints for viewing the maximum quality video and image content, please kindly search and locate more enlightening video articles and graphics that fit your interests.
Kalman Filter Sensor Fusion Code. 1012014 August 24-29 2014. As defined sensor fusion is a special case of the Kalman filter when there is infinite process noise. 24052013 Data fusion with kalman filtering 1. First we look at how actually noisy sensor readings look like. Ppt Good Object Tracking Motion Detection In Video Sequences Detection Sequencing Ppt from www.pinterest.com
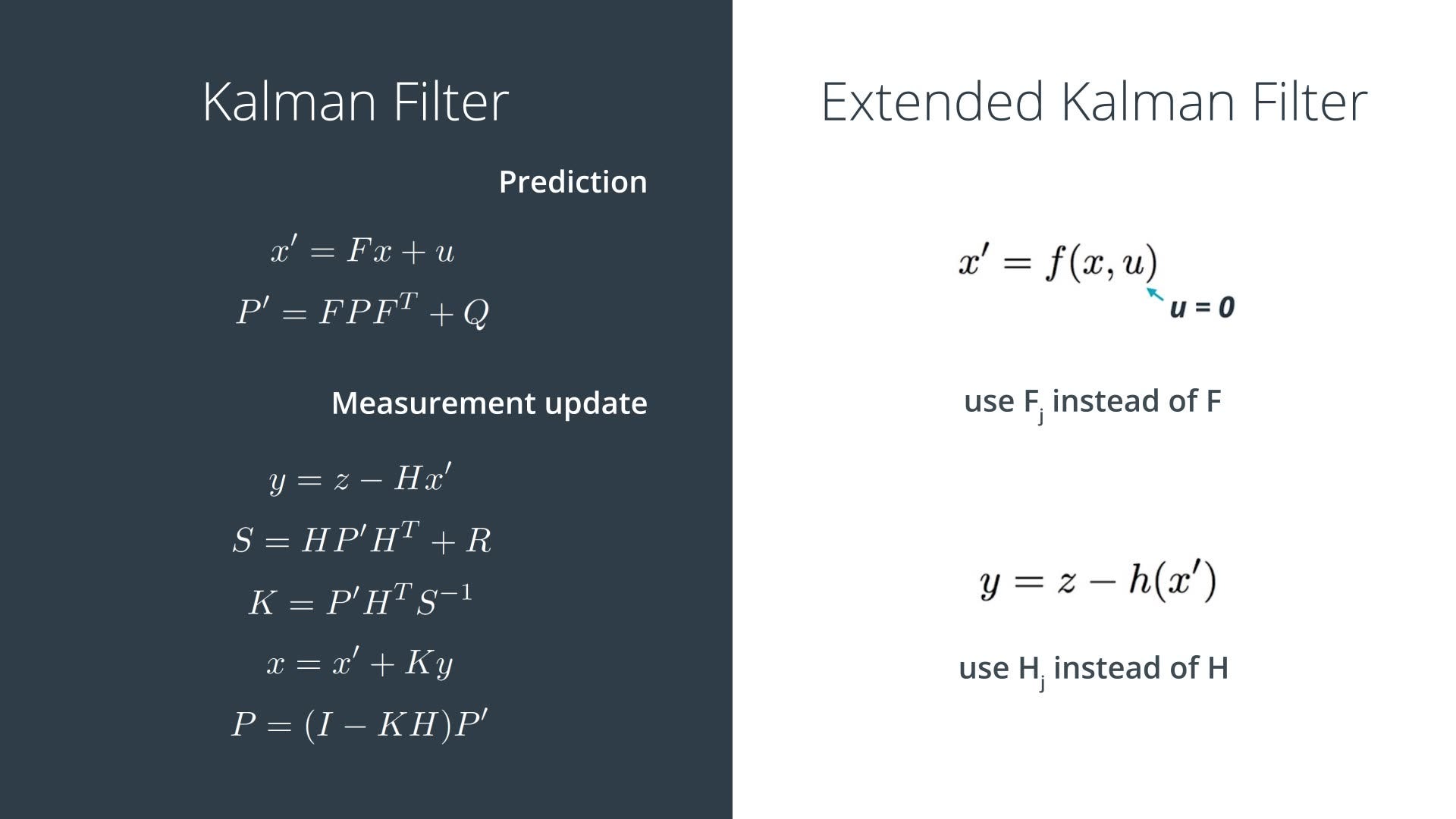
We will call 8 the sensor fusion SF estimate at time t 12 In this setting we will also refer to the measurements as sensors. Fusion of Radar and Lidar Data for calculation of 2D position and velocities. For this Im using Pitch. Even though it might look like a small step this is the foundational algorithm for many of the advanced versions used for Sensor fusion technology. Prior state and covariance VectorXd x VectorXd n_x. Kalman filter in its most basic form consists of 3 steps.
Here the comparsion between the Fusion and the ground truth data are shown.
First we look at how actually noisy sensor readings look like. Here the comparsion between the Fusion and the ground truth data are shown. This section describes the. It is based on the book Gustafsson 2010. According to the code the raw readings are displayed on the Serial Monitor directly. The tracker uses Kalman filters that let you estimate the state of motion of a detected object. Even though it might look like a small step this is the foundational algorithm for many of the advanced versions used for Sensor fusion technology. Implementation of extended kalman filter for sensor fusion. The filters are often used to estimate a value of a signal that cannot be measured such as the temperature in the aircraft engine turbine where any temperature sensor would fail. For int i 0. This may be more clear in code.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site adventageous, please support us by sharing this posts to your preference social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title kalman filter sensor fusion code by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.