Your Kalman filter sensor fusion imu wallpapers are ready. Kalman filter sensor fusion imu are a topic that is being searched for and liked by netizens today. You can Find and Download the Kalman filter sensor fusion imu files here. Download all free photos in Site Adı. Kalman filter sensor fusion imu was narrated holistic and detail.
If you’re searching for kalman filter sensor fusion imu pictures information related to the kalman filter sensor fusion imu keyword, you have come to the right blog. Our website always gives you suggestions for downloading the highest quality video and image content, please kindly hunt and locate more informative video articles and graphics that match your interests.
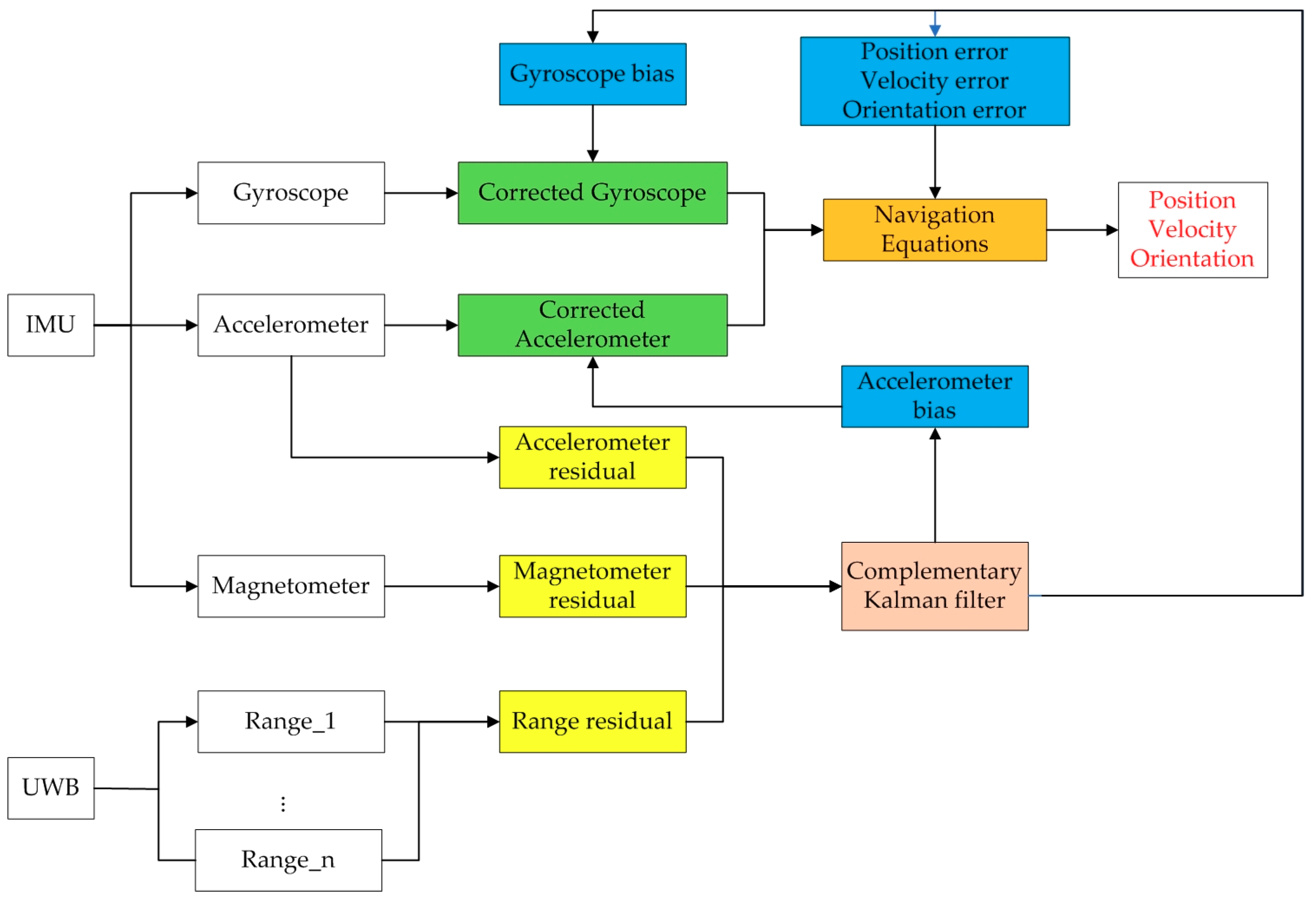
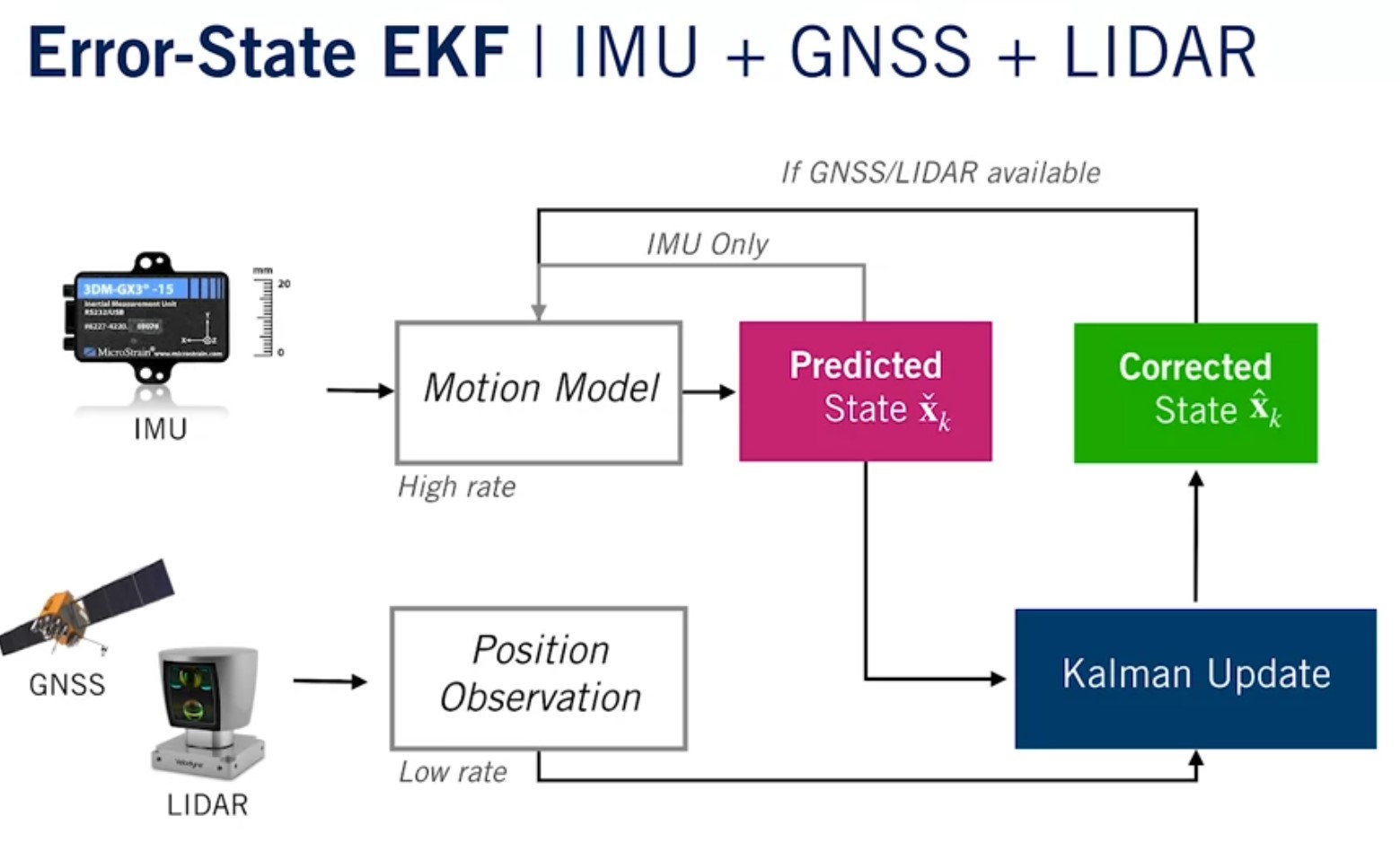
Kalman Filter Sensor Fusion Imu. This particular one is set up to accept the sensor measurements asynchronously which means that each of the sensors can be read at their own rate. Stabilize Sensor Readings With Kalman Filter. The use of the Kalman filter for human motion tracking in virtual reality Presence vol. Asked Sep 4 20 at 1047. Github Enginbozkurt Error State Extended Kalman Filter Vehicle State Estimation Using Error State Extended Kalman Filter from github.com
The filter reduces sensor noise and eliminates errors in orientation measurements caused by inertial forces exerted on the IMU. By using these independent sources the KF should be able to track the value better. EKF sensor fusion is achieved simply by feeding data streams from different sensors to the filter. I will give a concrete example from Robotics on sensor fusion of IMU measurements and Odometry estimates from other SLAM algorithm. The AHRS block in Simulink accomplishes this using an indirect Kalman filter structure. Stabilize Sensor Readings With Kalman Filter.
So all you need to do is setup your implementation to accept both encoder and IMU data.
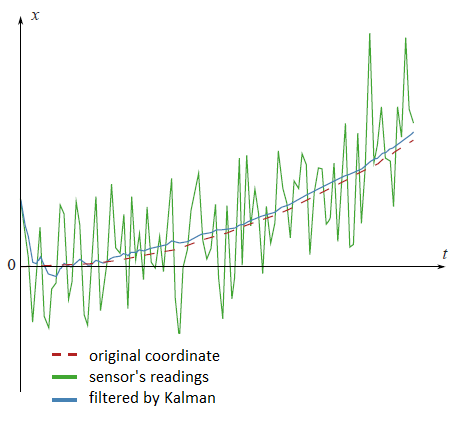
111 3 3 bronze badges endgroup 1. See more ideas about sensor kalman filter fusion. Kalman-filter imu sensor-fusion gnss. This program accesses IMU data from sensors and runs a Kalman filter on the data to estimate the orientation of the sensor. 24082018 Even though it might look like a small step this is the foundational algorithm for many of the advanced versions used for Sensor fusion technology. Stabilize Sensor Readings With Kalman Filter. 105 3 3 bronze badges. By using these independent sources the KF should be able to track the value better. 14052018 Kalman Filter for Sensor Fusion Idea Of The Kalman Filter In A Single-Dimension. Heading Reference System AHRS applications. So youve just bought an inertial measurement unit IMU and youre trying to figure out how to get Euler angles from it.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site value, please support us by sharing this posts to your own social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title kalman filter sensor fusion imu by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.