Your Kalman filter state estimation images 4K are available in this site. Kalman filter state estimation are a topic that is being searched for and liked by netizens today. You can Get the Kalman filter state estimation files here. Find and Download all royalty-free vectors in Site Adı. Kalman filter state estimation was described robust and image item.
If you’re looking for kalman filter state estimation pictures information connected with to the kalman filter state estimation keyword, you have pay a visit to the right site. Our site always gives you hints for viewing the highest quality video and image content, please kindly surf and find more informative video articles and graphics that fit your interests.
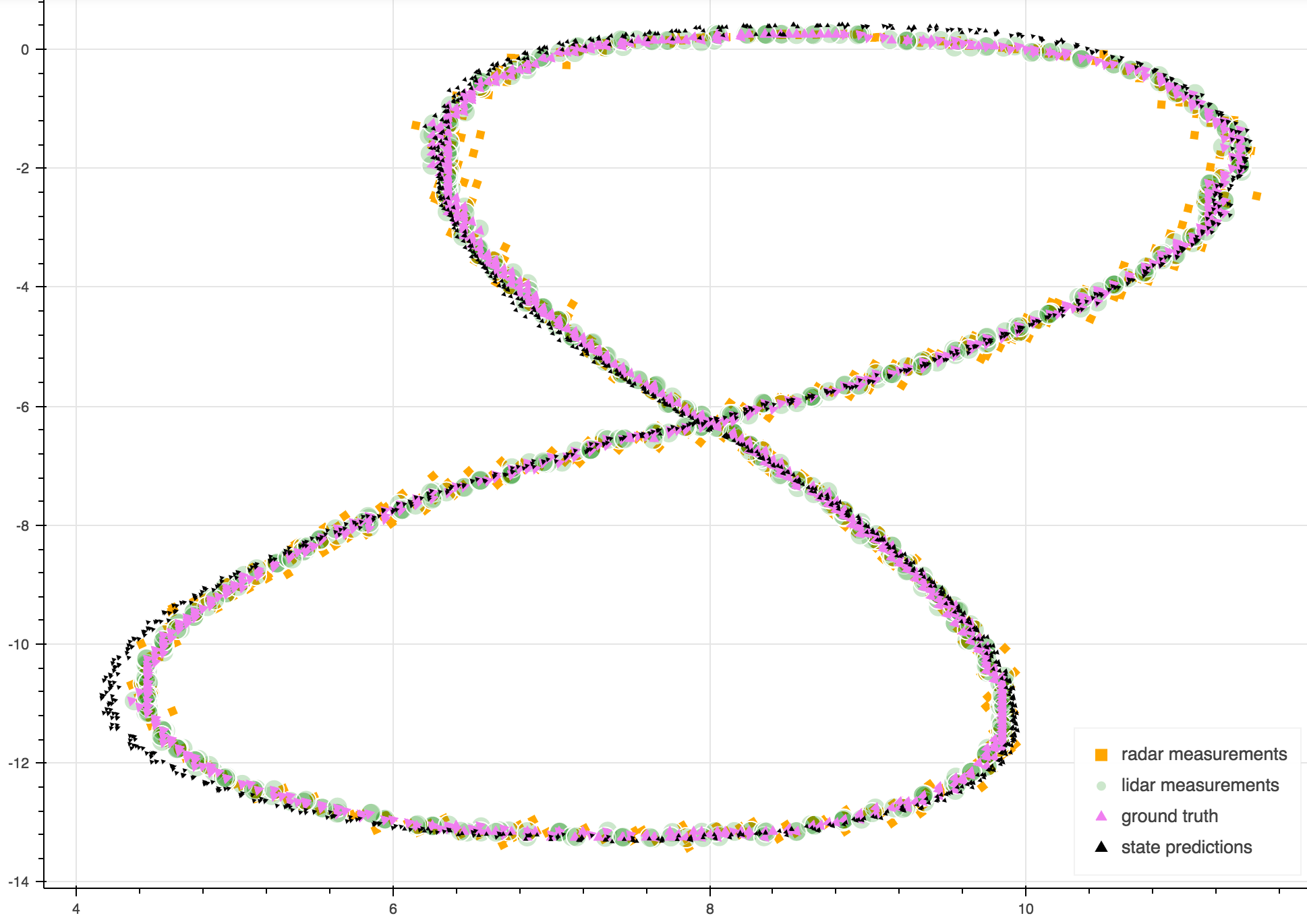
Kalman Filter State Estimation. As well the Kalman Filter provides a prediction of the future system state based on the past estimations. Kalman who developed the algorithm. It is also known as. 7052020 This is called state estimation and usually makes use of the Extended Kalman Filter for making sense of noisy sensor data. All About Kalman Filters In 2021 Kalman Filter Filters Self Driving from www.pinterest.com
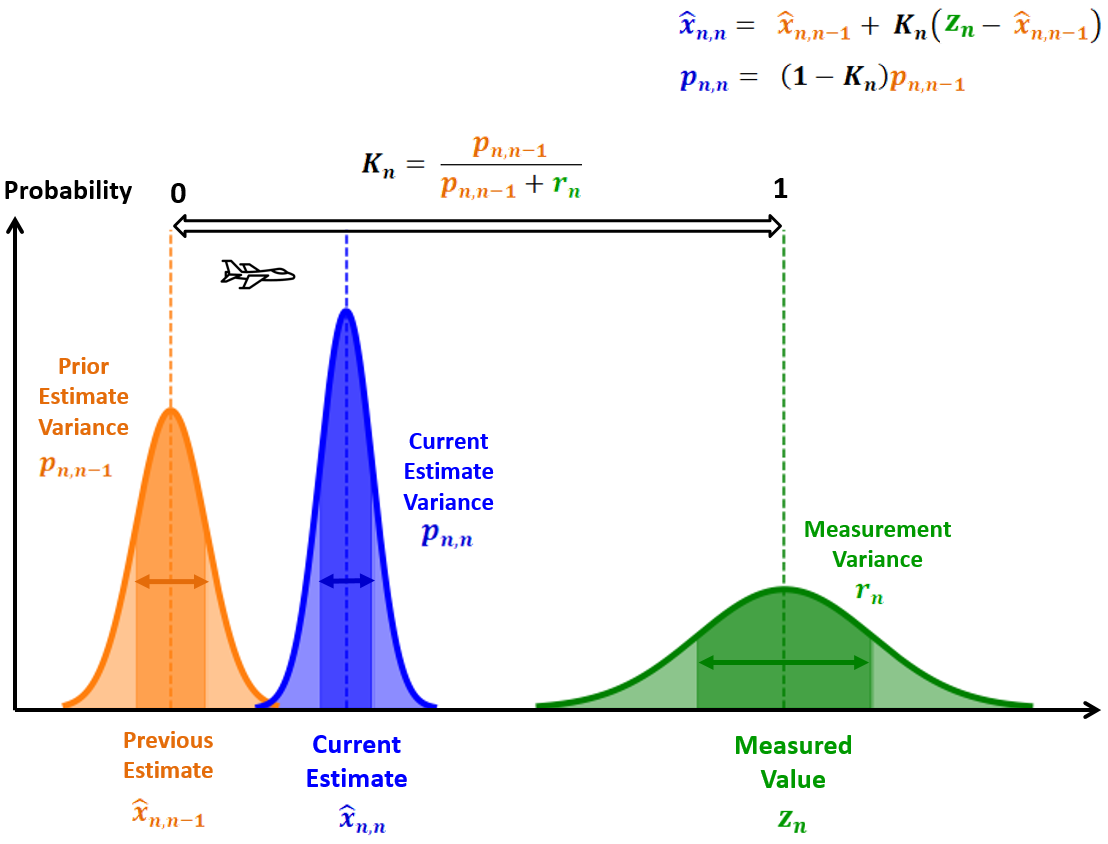
T TT xAxBu P APA Q KPHHPH R xxKzHx P PKHP. The Kalman filter has the following state and output equations. The Kalman Filter is a state estimator which produces an optimal estimate in the sense that the mean value of the sum actually of any linear combination of the estimation. Parameters versus states Until now we have assumed that the state-space model of the system whose state we are estimating is known and constant. Steady-state Kalman filter as in LQR Riccati recursion for Σtt1 converges to steady-state value Σˆ provided CA is observable and AW is controllable Σˆ gives steady-state error covariance for estimating x t1 given y0yt note that state prediction error covariance converges even if system is unstable Σˆ satisfies ARE. T he recursive optimal state estimation algorithm essentially estimates the.
Ask Question Asked 4 years 9 months ago.
This linear model describes the evolution of the estimated variables over time in response to model initial conditions as well as known and unknown model inputs. State transition matrix — dynamics. Active 4 years 9 months ago. The Kalman filter is an optimal estimation algorithm named after the Rudolf E. Using data which is filtered reconstruct values for unmeasured state variables Definitions. The unscented Kalman filter for state estimation. State Space or motion model Using the state-space model we can predict the next state of the car. Parameters versus states Until now we have assumed that the state-space model of the system whose state we are estimating is known and constant. The Kalman filter and nonlinear eg. State estimation by Dual Kalman Filter. It is also known as.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site good, please support us by sharing this posts to your own social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title kalman filter state estimation by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.