Your Kalman filter tracking tutorial images HD are available. Kalman filter tracking tutorial are a topic that is being searched for and liked by netizens now. You can Find and Download the Kalman filter tracking tutorial files here. Download all free vectors in Site Adı. Kalman filter tracking tutorial was reported completly and image item.
If you’re looking for kalman filter tracking tutorial images information related to the kalman filter tracking tutorial keyword, you have come to the ideal blog. Our site always gives you suggestions for viewing the highest quality video and picture content, please kindly search and locate more informative video articles and graphics that fit your interests.
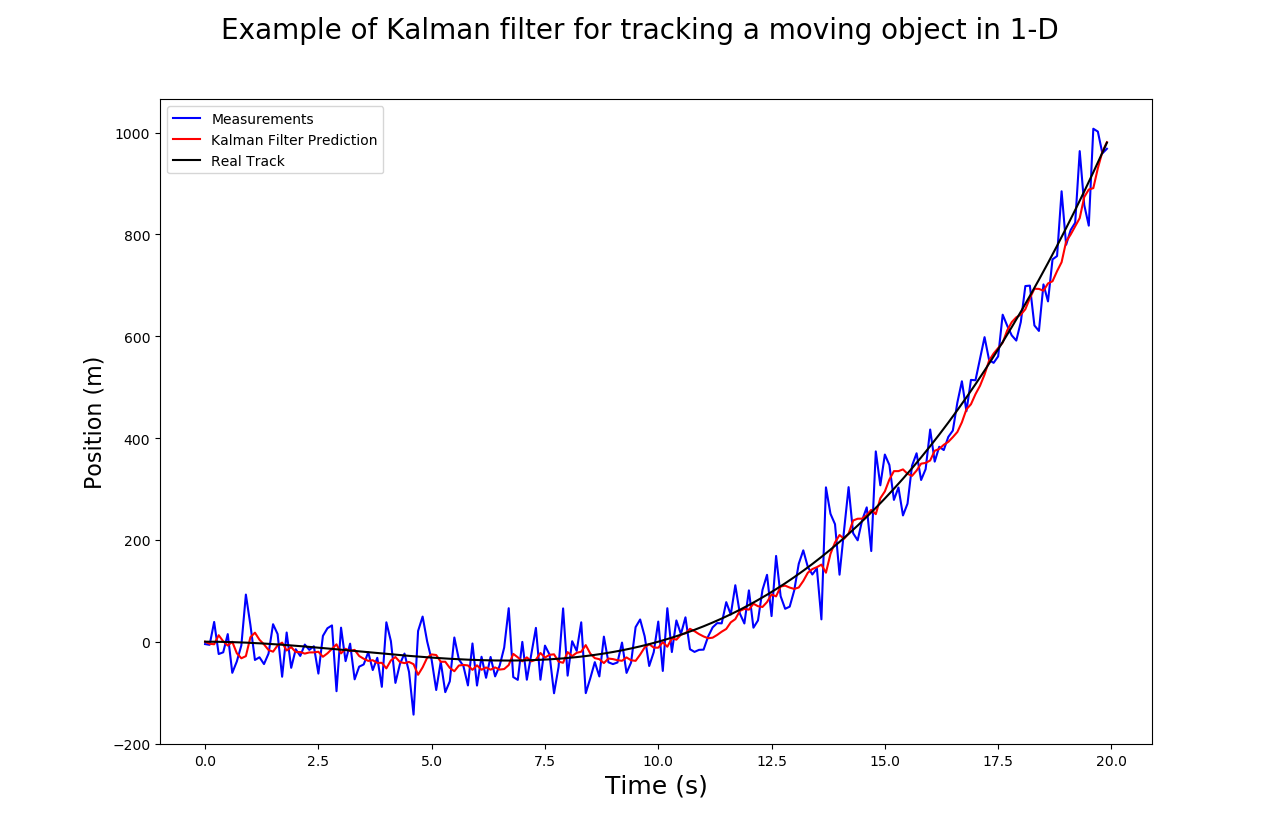
Kalman Filter Tracking Tutorial. The Kalman filter is a mathematical method named after Rudolf Kalman an Hungarian-American electrical engineer mathematical system theorist and college professor. Terejanu Department of Computer Science and Engineering University at Buffalo Buffalo NY 14260 terejanubuffaloedu 1 Introduction Consider the following stochastic dynamic model and the sequence of noisy observations z k. This tutorial will go through the step by step process of a Kalman Filter being used to track airplanes and objects near airports. Surprisingly few software engineers and scientists seem to know about it and that makes me sad because it is such a general and powerful tool for combining information in the presence of uncertainty. Opencv 3 Car Counting C Full Source Code Youtube Source Code Coding Duke University from www.pinterest.com
A Kalman filter takes in information which is known to have some error uncertainty or noise. 111 In tro duction The Kalman lter 1 has long b een regarded as the optimal solution to man y trac king and data prediction tasks 2. Discrete Kalman Filter Tutorial Gabriel A. Today the Kalman filter is used in Tracking Targets Radar location and navigation systems control systems computer graphics and much more. Radars are not built equally. X k fx k1u k1w k1k 1 z k hx ku kv kk 2.
And for you final question you are right.
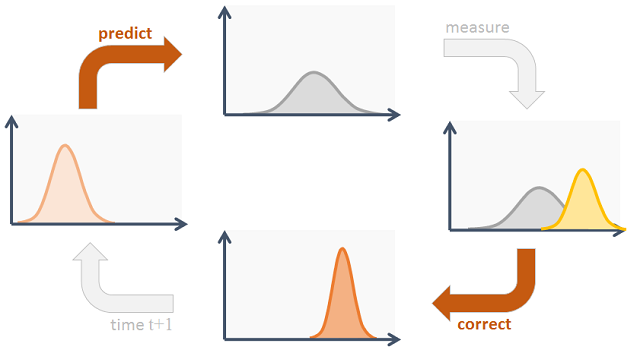
Terejanu Department of Computer Science and Engineering University at Buffalo Buffalo NY 14260 terejanubuffaloedu 1 Introduction Consider the following stochastic dynamic model and the sequence of noisy observations z k. The standard Kalman lter deriv ation is giv. Its use in the analysis of visual motion has b een do cumen ted frequen tly. It corresponds to the number of object to track one kalman filter per object. The prediction requirement Before diving into the Kalman Filter explanation lets first understand the need for the prediction algorithm. The output track states are used to display to the air traffic control operators monitoring the air space. This tutorial will go through the step by step process of a Kalman Filter being used to track airplanes and objects near airports. 31122020 Kalman Filter Radar Tracking Tutorial. 14092016 2D Object Tracking Tutorial with Kalman Filter Matlab code Published on September 14 2016 September 14 2016 27 Likes 13 Comments. A Kalman filter takes in information which is known to have some error uncertainty or noise. As summary kalman filter is mainly used to solve the data association problem in video tracking.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site serviceableness, please support us by sharing this posts to your own social media accounts like Facebook, Instagram and so on or you can also bookmark this blog page with the title kalman filter tracking tutorial by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.