Your Parameter estimation kalman filter wallpapers are ready in this website. Parameter estimation kalman filter are a topic that is being searched for and liked by netizens today. You can Get the Parameter estimation kalman filter files here. Download all free photos and vectors in Site Adı. Parameter estimation kalman filter was explained robust and detail.
If you’re looking for parameter estimation kalman filter images information linked to the parameter estimation kalman filter interest, you have visit the ideal blog. Our site always gives you suggestions for refferencing the highest quality video and image content, please kindly hunt and find more informative video content and images that fit your interests.
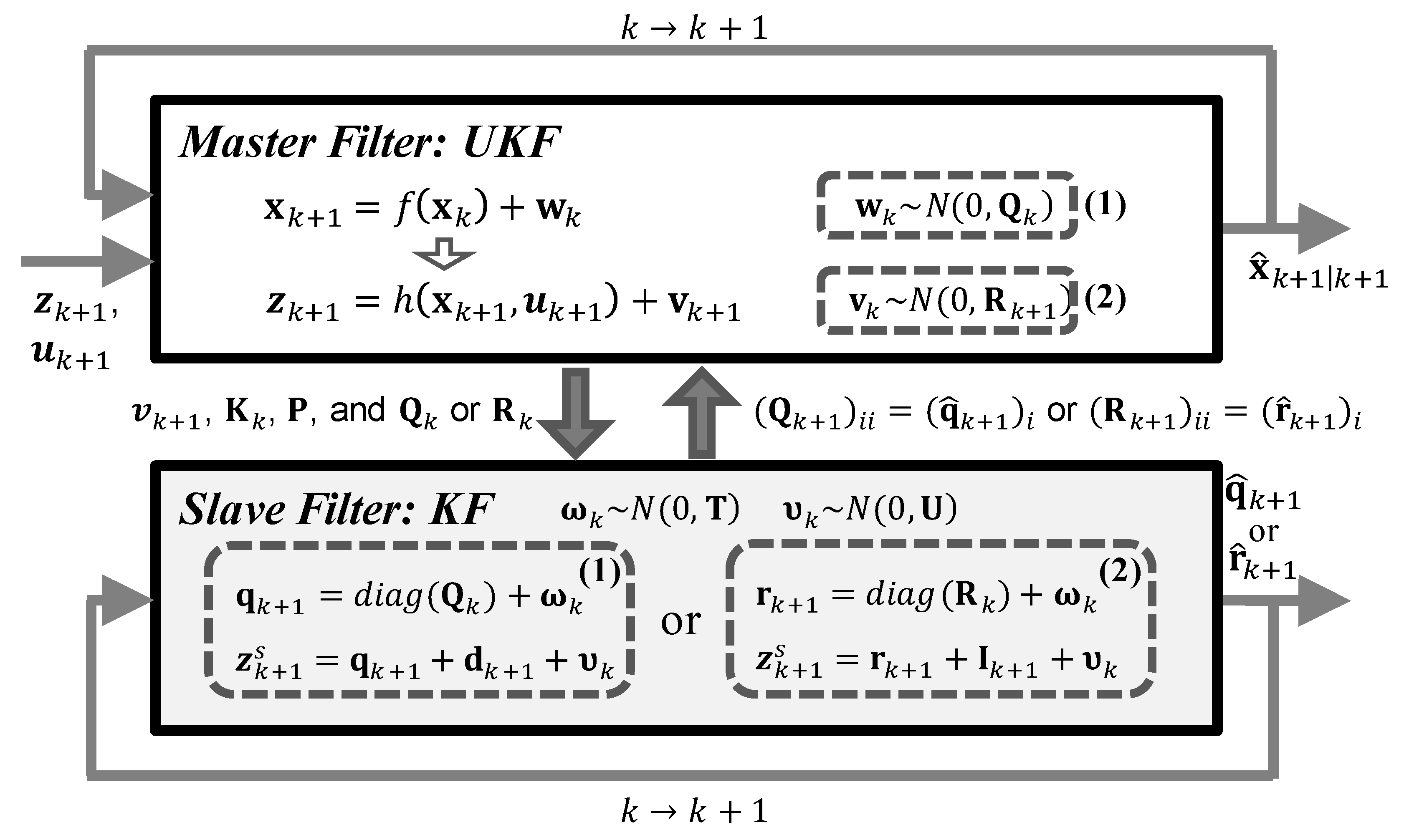
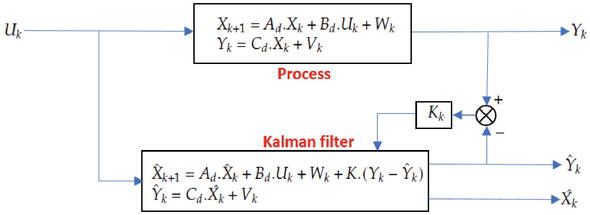
Parameter Estimation Kalman Filter. θ k1 θ k r k d k h kx ku kθ ke k. Parameters which are measured. Kalman Filter Parameter Estimation Using Unscented Kalman Filter Multi Phase Flow Meter MPFM Extended Kalman Filter Event driven Camera based Eye Tracking This study proposes a general diagnostic approach based on a camera based eye-tracking technique and a discrete Kalman filter as an iris tracker. General Algorithm Quantities of interest Measured data true data plus measurement noise Measurement function Optimal blending factor Kalman Gain. Kalman Filtering Applied To Induction Motor State Estimation Intechopen from www.intechopen.com
Parameter Estimation for Mechanical Systems Using an Extended Kalman Filter Blanchard E Sandu A and Sandu C. Over the last 20-30 years the extended Kalman filter EKF has become the algorithm of choice in numerous nonlinear estimation and machine learning applications. You should finish with estimation for Y-2 Y_3. You do not need a Kalman filter to estimate a parameter. Modelforecast and adjusted state vectors Forecastmodel function. Σ t AtΣt ΣtATt.
Specifically the initial values passed to the SSM estimate function are encoded into a column vector.
KKF allows optimal estimates of states to be obtained in presence of unknown inputs by appropriately choosing the gain matrix during the state update step. 19042017 Simultaneous state and parameter estimation with dual extended Kalman filter is presented in Ref. Further if there is any modeling error or the initial estimate is way too different from the true value the filter may quickly diverge due to the approximations considered. If the parameter is in fact. Kalman Filter Parameter Estimation Using Unscented Kalman Filter Multi Phase Flow Meter MPFM Extended Kalman Filter Event driven Camera based Eye Tracking This study proposes a general diagnostic approach based on a camera based eye-tracking technique and a discrete Kalman filter as an iris tracker. 11 using a joint UKF. PARAMETER ESTIMATION USING KALMAN FILTERS WITH CONSTRAINTS DAVID M. General Algorithm Quantities of interest Measured data true data plus measurement noise Measurement function Optimal blending factor Kalman Gain. The methods can be individually used for the purpose of signal and parameter estimation but individually they suffer from some drawbacks. The Extended Kalman Filter EKF has become a standard techniqueusedina numberofnonlinearestimationandma-chine learning applications. You should use a parameter estimation technique like recursive least squares or one of its variants.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site value, please support us by sharing this posts to your preference social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title parameter estimation kalman filter by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.