Your Udacity kalman filter images HD are ready. Udacity kalman filter are a topic that is being searched for and liked by netizens now. You can Get the Udacity kalman filter files here. Get all free photos in Site Adı. Udacity kalman filter was narrated holistic and image item.
If you’re looking for udacity kalman filter pictures information related to the udacity kalman filter interest, you have come to the right site. Our site frequently provides you with hints for downloading the highest quality video and image content, please kindly hunt and locate more informative video content and graphics that match your interests.
Udacity Kalman Filter. The objective was to track a. Make social videos in an instant. In this project you will utilize a kalman filter to estimate the state of a moving object of interest with noisy lidar and radar measurements. The Monte Carlo Localization method is the method you learned in the first unit though we did not call it. Marrying Kalman Filtering Machine Learning from www.pinterest.com
UdacityCarND-Extended-Kalman-Filter-Project Self-Driving Car Nanodegree Program Starter Code for the Extended Kalman Filter Project Total stars 246 Stars per day 0 Created at 3 years ago Language C Related Repositories CarND-Path-Planning-Project Create a path planner that is able to navigate a car safely around a virtual highway simbody. Lidar camera and radar. 30052017 Sensor Comparison Chart Source. Udacity is not an accredited university and we dont confer traditional degrees. The Unscented Kalman Filter. Broadcast your events with reliable high-quality live streaming.
30052017 Sensor Comparison Chart Source.
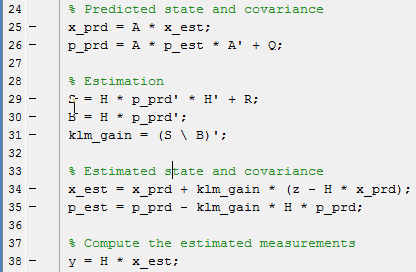
Measurement Update 과정에서는 새롭게 얻은 센서값과 우리의 예측값을 비교하여 최종 예측값을 도출한다.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site beneficial, please support us by sharing this posts to your preference social media accounts like Facebook, Instagram and so on or you can also bookmark this blog page with the title udacity kalman filter by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.