Your Kalman filter tracking example images HD are ready in this website. Kalman filter tracking example are a topic that is being searched for and liked by netizens today. You can Find and Download the Kalman filter tracking example files here. Find and Download all free images in Site Adı. Kalman filter tracking example was informed holistic and item by item.
If you’re looking for kalman filter tracking example images information linked to the kalman filter tracking example topic, you have visit the ideal blog. Our website always gives you suggestions for seeing the maximum quality video and picture content, please kindly search and locate more informative video content and graphics that match your interests.
Kalman Filter Tracking Example. The measurements obtained are from the level of the float. A Kalman filter takes in information which is known to have some error uncertainty or noise. Likelihood of the observations given the filter parameters is used is multi-target tracking. For example consider an object tracking scenario where a stream of observations is the input however it is unknown how many objects are in. Dsp System Toolbox Matlab Simulink Tool Box System Signal Processing from www.pinterest.com
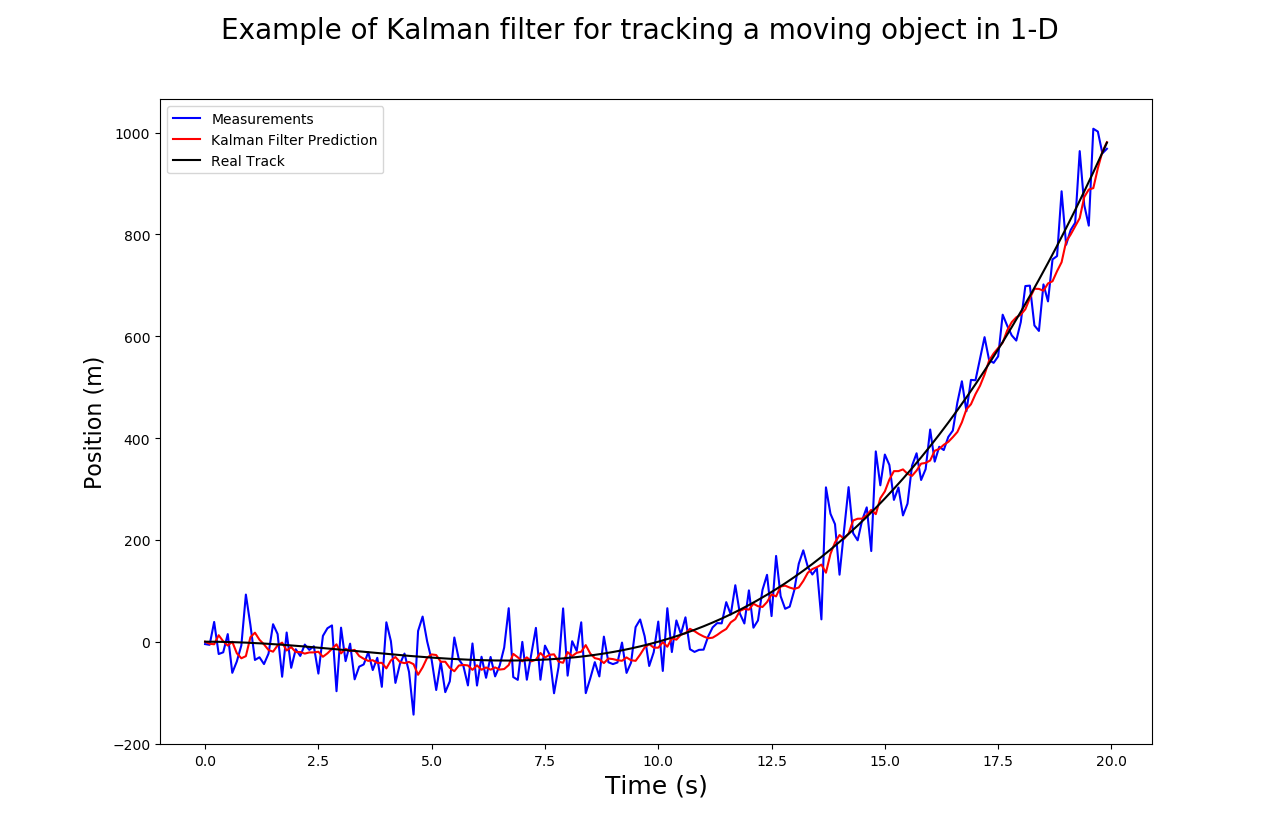
It can be observed that the Kalman filter is tracking the moving object with a. 6 illustrates the result in four different frames. Which works but if a add gausian noise of - 20 mm to the sensor readings xyvxvy fluctuates even though the point is not moving just noise. A Kalman filter also acts as a filter but its operation is a bit more complex and harder to understand. It is used in all sort of robots drones self-flying planes self-driving cars multi-sensor fusion. For example Kalman Filtering is used to do the following.
Meaning that instead of considering only for the position and velocity in one direction lets say the -direction we need to take into account the position and velocity in the -direction as.
This is shown in the figurea. Prediction model involves the actual system and the process noise The update model involves updating the predicated or the estimated value with the observation noise. It can be observed that the Kalman filter is tracking the moving object with a. The equations of 2-D Kalman Filter whose position and velocity must be considered in 2-dimensional direction the and directions can be created by modifying the 1-D Kalman Filter equations. This is shown in the figurea. For this example the getMeasurement function is used to simulate a sensor providing real-time position measurements of a performance automobile as it races down a flat road with a constant velocity of 60 meters per second. I measure xy of the object and track xyvxvy. The yellow circle is our main trackerwhich is used as the input to the Kalman filter every 3 frames and the black circle is the prediction of Kalman filter. Meaning that instead of considering only for the position and velocity in one direction lets say the -direction we need to take into account the position and velocity in the -direction as. A Kalman filter is an optimal estimator - ie infers parameters of interest from indirect inaccurate and uncertain observations. Because in tracking we are dealing with continuous signals with an uncountable sample.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site serviceableness, please support us by sharing this posts to your own social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title kalman filter tracking example by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.