Your Kalman filter tracking matlab code images HD are available. Kalman filter tracking matlab code are a topic that is being searched for and liked by netizens today. You can Find and Download the Kalman filter tracking matlab code files here. Find and Download all royalty-free images in Site Adı. Kalman filter tracking matlab code was explained holistic and item by item.
If you’re looking for kalman filter tracking matlab code pictures information related to the kalman filter tracking matlab code interest, you have visit the ideal site. Our website always provides you with hints for downloading the highest quality video and image content, please kindly search and find more enlightening video content and graphics that fit your interests.
Kalman Filter Tracking Matlab Code. Kalman Filter Matlab Code Search form Kalman filter is an algorithm that uses a series of measurements observed over time containing noise random variations and other inaccuracies and produces estimates of unknown variables that tend to be more precise than those based on a single measurement alone. 14092016 2D Object Tracking Tutorial with Kalman Filter Matlab code Published on September 14 2016 September 14 2016 27 Likes 13 Comments. The code uses the summation-by. MATLAB code Kalman filtering target tracking. Radar Tracking Matlab Simulink from www.mathworks.com
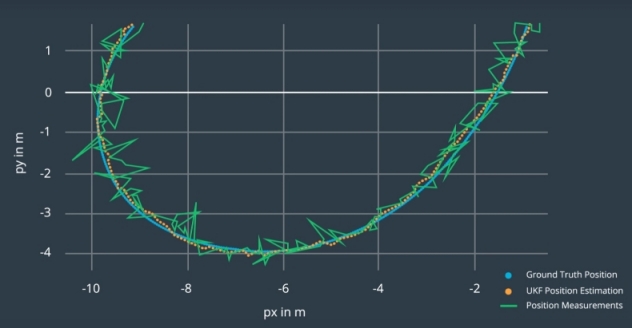
What you need is a linear system model that describes the trajectory of your car. By optimally combining a expectation model of the world with prior and current information the kalman filter provides a powerful way to use everything you know to build an accurate estimate of how things will change over time figure shows noisy observation black and good tracking green of. About Press Copyright Contact us Creators Advertise Developers Terms Privacy Policy. Unscented Kalman Filter on the other hand does not need to linearize non-linear functions insteadly the unscented Kalman filter. This example shows how to use the visionKalmanFilter object and configureKalmanFilter function to track objects. Target tracking using Kalman Kalman filter MATLAB.
It processes all available measurements regardless of their precision to estimate the current value of the variables of interest with use of knowledge of the system and measurement device.
One of the aspect of this optimality is that the Kalman filter incorporates all the information that can be provided to it. One of the aspect of this optimality is that the Kalman filter incorporates all the information that can be provided to it. My e-mail adress. The Kalman filter is an optimized quantitative expression of this kind of system. The code uses the summation-by. Kalman Filter is 5-6 lines in a loop. You can use MATLAB Simulink and Control System Toolbox to design and simulate. The yellow circle is our main trackerwhich is used as the input to the Kalman filter every 3 frames and the black circle is the prediction of Kalman filter. Source Code Target tracking using Kalman Kalman filter MATLAB. In this repo you can see two different methods. Filter trackingKF___NameValue configures the properties of the Kalman filter by using one or more NameValue pair arguments and any of the previous.
This site is an open community for users to share their favorite wallpapers on the internet, all images or pictures in this site are for personal wallpaper use only, it is stricly prohibited to use this wallpaper for commercial purposes, if you are the author and find this image is shared without your permission, please kindly raise a DMCA report Contact Us.
If you find this site helpful, please support us by sharing this posts to your preference social media accounts like Facebook, Instagram and so on or you can also save this blog page with the title kalman filter tracking matlab code by using Ctrl + D for devices a laptop with a Windows operating system or Command + D for laptops with an Apple operating system. If you use a smartphone, you can also use the drawer menu of the browser you are using. Whether it's a Windows, Mac, iOS or Android operating system, you will still be able to bookmark this website.